roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
7.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
7.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
7. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Info: Spieldetails
MarbleBots:
Robot: Alpha 2.0
Robot: Beta 2.0
Robot: Black Rogue Sniper
Robot: Blackbox
Robot: Homage an Bernhard
Robot: Kugelfisch
Robot: Marble 1
Robot: Marble 2
Robot: Max
Robot: Moritz
Robot: Notlösung
Robot: Tohuwabohu
SumoBots:
Robot: code red
Robot: Dead of Code Red
Robot: Master of Disaster
Robot: Windmühle
Start der Battle: Action! (Sumo)
Start der Battle: Action! (Marble)
Was haben wir daraus gelernt?: Fazit
Ende: Danksagung
Archiv: Info zur Robo-Battle
am. 13. 10. 2002
 |
Vormittag:
Am 13. 10. 2002 war es wieder soweit! Diesmal trafen sich 10 Teams und brachten insgesamt 16 BattleBots mit! Mechanisch waren diesmal die meisten Bots fertig, nur an der Software wurde noch viel geschraubt ... Wir haben also mit der üblichen 1-2stündigen Verspätung angefangen ... |





|
| Spieldetails
Marble:
Zwei Roboter spielen jeweils gegeneinander. Das Ziel ist es, Kugeln seiner Farbe (schwarz
oder weiß) am Spielfeld einzusammeln und in sein Nest, eine Ecke des Spielfeldes, zu
bringen. Nach drei Minuten werden drei Punkte für jede Kugel seiner Farbe und die
im Roboter oder seinem Nest sind vergeben, vier Punkte für jede Kugel abgezogen, welche nicht
sein Farbe sind. Jede Kugel im Nest zählt doppelt.
Spieldetails Sumo: In jeder Battle werden zwei Roboter im Abstand von zwanzig Zentimetern gegenüber aufgestellt. Das Ziel ist es, den geg nerischen Roboter vom Spielfeld zu drängen oder bewegungsunfähig zu machen. Nach zwei Minuten werden die Roboter gestoppt und die Punkte verteilt ... |
| Alpha
2.0:
Dieser Bot hatte eine normale rechts-links Steuerung mit Gummiraupen, allerdings
keinen einzigen Taster als Sensor angebaut. Die Erkennung eines
Hindernisses wurde durch einen Rotationssensor, der an einer der
angetriebenen Achsen montiert war, realisiert. Hat sich die Achse nicht
mehr gedreht war der Bot wohl bei einem Hindernis ... Auch der "Sorter" war bei ALPHA 2.0 ganz anders: Vor dem Kugelbehälter waren zwei Lichtsensoren montiert. Wenn sie eine richtige Kugel erkannten, hoben sie die Klappe und der Bot sammelte die Kugel ein, Klappe zu, fertig. Bei einer falschen Kugel blieb die Klappe zu und der Bot schwenkte weg. Erkannten die Lichtsensoren allerdings das eigene Nest ging die Klappe auf, der Bot fuhr zurück und deponierte die gesammelten Kugeln im Nest, doppelte Punkte! Leider hatte Alpha 2.0 diesmal Probleme mit dem glatten Spielfeld, auf dem ihm viele Kugeln wegliefen ... Battle: Marble Erbauer: Martin Technische Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Bewertung: bei der dritten Battle war es wesentlich besser als diesmal ... |
 |



|
|
Beta 2.0:
Der baugleiche Zwilling von Alpha 2.0. Die gleiche Technik, die gleichen Probleme ... Battle: Marble Erbauer: Martin Technische Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Bewertung: bei der dritten Battle war es wesentlich besser als diesmal ... |
|
|
| Black
Rogue Sniper (BRS): DECKUNG, Sniper
schießt scharf! Thomas war mit seinen Freunden erstmalig bei unseren Battles und ist mit einem total unüblichen Roboter gekommen. Sein Raupenfahrzeug Sniper hat an der Unterseite einen Kugelaufzug System RoadRunner eingebaut. Die hochgehobenen Kugeln werden dann nach der Farbe sortiert: die Guten in den Vorratsbehälter, die Schlechten werden aus dem Bot geworfen. NaJa, nicht geworfen, geschossen! Sniper hatte zwei extra Motore an Bord, die die falschen Kugeln im Winkel von 45 Grad aus dem Bot und damit aus dem Spielfeld schossen. Da war es angebracht in Deckung zu gehen! Battle: Marble Erbauer: Thomas Techn. Ausrüstung: 5 Motore, 1 Mikromotor, 2 Taster, 2 Lichtsensor Fazit: ein gefährlicher Bot ... |
 |
    |
 |
Blackbox: Bernhard
hat uns zum zweiten Mal besucht und war diesmal wesentlich besser
vorbereitet als beim der letzten Battle. Sein Blackbox war auf
Raupen montiert und hatte an der Unterseite eine Weichenstellung für die
gesammelten Kugeln. Obwohl er nicht spektakulär aussah, kam er mit seiner
versteckten Technik doch bis zum dritten Platz ... Battle: Marble Erbauer: Bernhard Techn. Ausrüstung: 3 Motore, 1 Lichtsensor, 2 Rotationssensor Fazit: kein weiß was drinnen vor sich geht ... |


 |
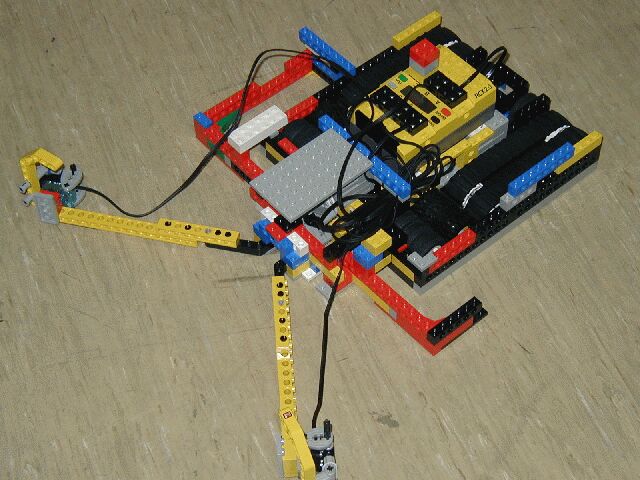
| Homage
an Bernhard: Sascha war ganz klar der Erste! Der
Erste, der einen Spybot bei unseren Battles verwendet hat ... Und das hat er recht gut gemacht! Allerdings muß man bei einem Spybot tief in die Trickkiste greifen, da er nur zwei eingebaute Motore hat. Sascha hat eine Idee von Bernhard aufgegriffen, wie mit zwei Motoren ein rechts/links-Antrieb und ein Kugelsorter betrieben werden kann: Die im Spybot eingebauten Motore treiben den Bot ganz normal an. Wird eine Kugel in der Meßstelle eingefangen, dann stoppt der Bot, entscheidet auf gut oder schlecht, setzt ein Stück zurück und fährt eine kleine Rechts- bzw. Linkskurve. Dadurch läuft die Kugel entweder in einen Sammelbehälter oder wieder aus dem Bot heraus. So weit die Theorie. Die Praxis sah leider ein wenig schlechter aus! Battle: Marble Erbauer: Sascha Techn. Ausrüstung: 1 Spybot (2 Motore, 1 Taster, Lichtsensor) Fazit: mit wenig Mitteln wenig erreicht ... |
 |


 |
 |
Kugelfisch: Sacha's
zweiter Bot war (wie alle anderen auch) auf einem RCX aufgebaut. Sein Kugelfisch
mit Raupenantrieb hatte an der Unterseite zwei zusätzliche Raupen, welche
einerseits die Kugeln einfangen und andererseits die falschen Kugeln
gleich wieder aus dem Bot herausbefördern sollten. Dabei kamen sich
allerdings die scharzen und die weißen Kugeln ein wenig in die Quere
... Battle: Marble Erbauer: Sascha Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: die Idee des Sorters sollte noch überarbeitet werden ... |



 |
| Marble 1: Andreas
hat es sich leicht gemacht! Er hat die vorhandenen MLCad-Pläne genommen
und meinen BUGG-Y der dritten Robobattle nachgebaut. Seine einzige
Änderung bestand in einem modifizierten Kugelsammelbehälter ... Battle: Marble Erbauer: Andreas Technische Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Bewertung: klein, kompakt, nicht so übel ... |
 |



 |
 |
Marble 2: Markus
hat es sich leicht gemacht! Er hat die vorhandenen MLCad-Pläne genommen
und meinen BUGG-Y der dritten Robobattle nachgebaut. Seine einzige
Änderung bestand in einem modifizierten Kugelsammelbehälter ... Battle: Marble Erbauer: Markus Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: klein, kompakt, nicht so übel ... |
|
|
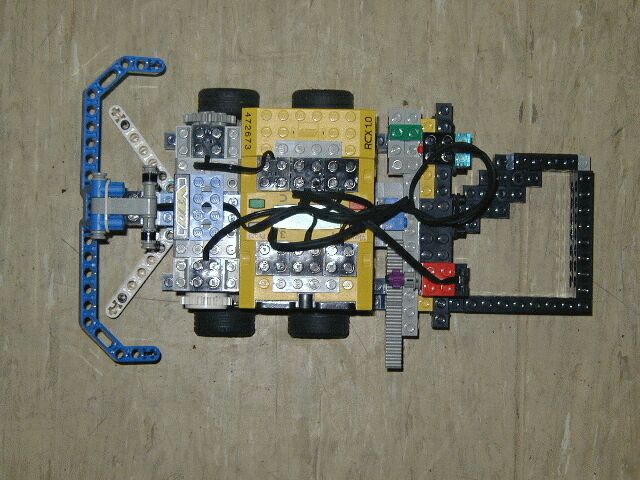
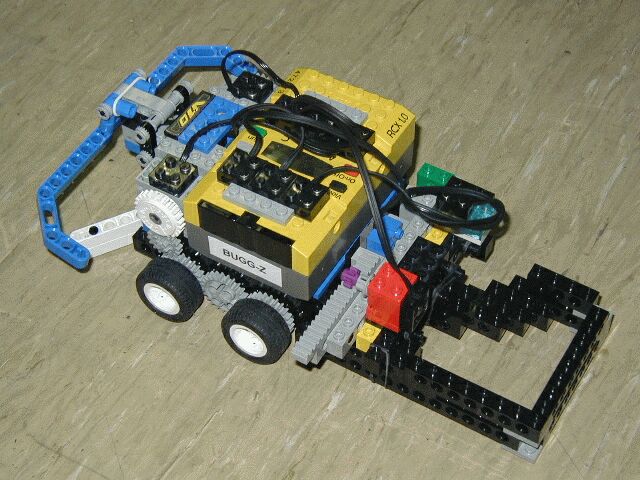
| Max: Auch
ich habe es mir einfach gemacht und habe meinen BUGG-Y Bot der
dritten Robobattle nachgebaut. Nur die Software wurde etwas verändert.
Diesmal fuhr der Bot auch wesentlich besser am Spielfeld herum Battle: Marble Erbauer: Mike Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: klein, kompakt, nicht so übel ... |
 |


 |
|
Moritz: Der
Bruder von Max war vollkommen baugleich ... Battle: Marble Erbauer: Mike Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: klein, kompakt, nicht so übel ... |
|
|
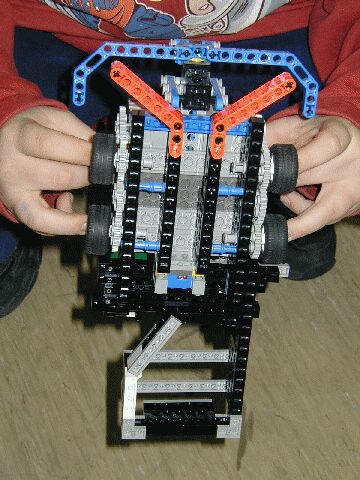
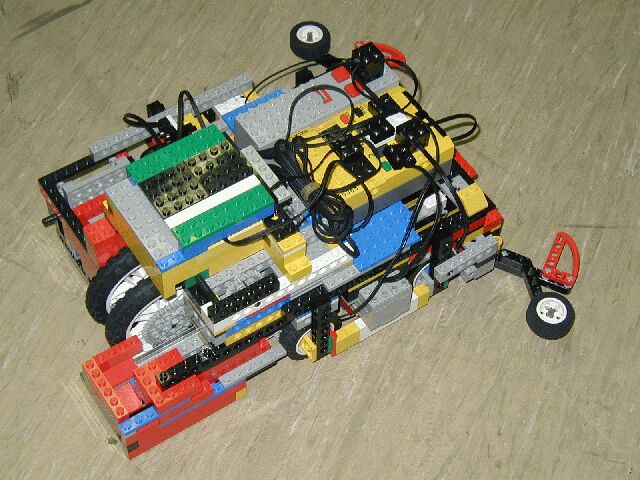
| Notlösung: Christian
war erstmalig bei unserer Battle und hat uns mit einem
"Convertible" Bot überrascht. Eigentlich war seine Notlösung
ein Sumo-Bot, aber durch einen Aufsatz wurde er zum Kugelsammler.
Allerdings konnte er seine Herkunft nicht verleugnen, er war kraftvoll,
aber sehr langsam unterwegs. Steuern konnte man ihn auch nicht, er fuhr
langsam, aber sicher, geradeaus. Dabei hat er wenige Kugeln eingesammelt,
aber viele Kugeln dem Gegner ins Nest geschoben, und damit für
Minuspunkte beim Gegner gesorgt ... Battle: Marble Erbauer: Christian Techn. Ausrüstung: 2 Motore, 2 Taster, 1 Lichtsensor Fazit: seltsamer Bot, hat aber genug Punkte für den zweiten Platz gesammelt ... |
 |


 |
 |
Tohuwabohu: Auch
ein neuer Teilnehmer. Und dann gleich gewinnen? Ob wir ihn noch mal
einladen? *g Klaus hat bei seinem Tohuwabohu sehr viele verschiedene Bauteile eingesetzt. Motore, Polwender, Stromschienen der Eisenbahn, usw ... Sein Bot hat die Kugeln durch eine Raupe zu einem Kugelaufzug System RoadRunner gebracht, dort wurden sie hochgehoben und verteilt. Die falschen Kugeln landeten in einem Vorratsbehälter, der sich mittels Zahnstange motorisch öffnen ließ. Leider haben wir diese Funktion nie in Betrieb gesehen ... Battle: Marble Erbauer: Klaus Techn. Ausrüstung: 5 Motore, 1 Mikromotor, 2 Taster, 2 Lichtsensor Fazit: irgendwie hat er die meisten Kugeln gesammelt ... |


 |
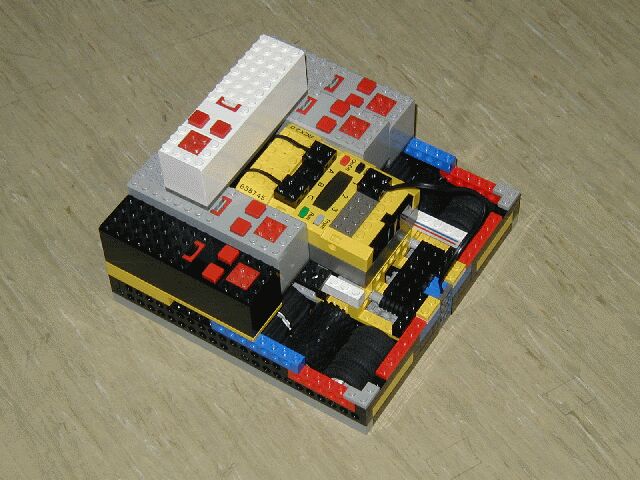
| code red: Dieser
Bot hatte eine starre
Hinterachse, an welcher zwei Motore mit hoher Übersetzung und Getriebebox
befestigt waren. Um wenig Angriffsfläche zu bieten war code red sehr
niedrig gebaut. Während der Battle wurde er noch aus Gewichtsgründen mit
5 gefüllten Batterieboxen bestückt ... Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 2 Motore Fazit: code red rulez, ungeschlagener Sieger ... |
 |



 |
 |
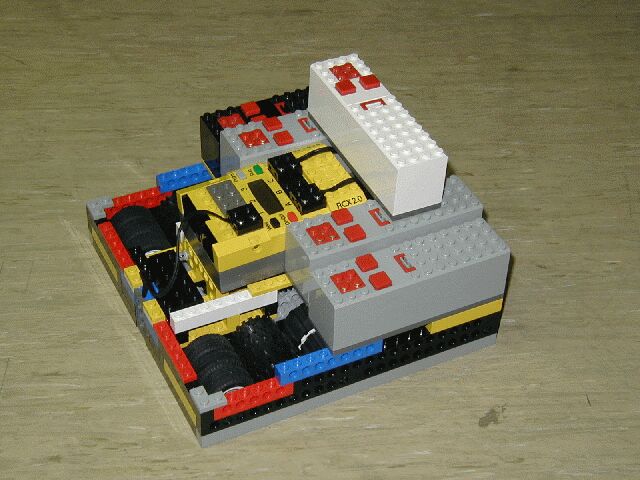
Dead
of Code Red: Christian
kam mit dem erklärten Vorsatz, code red zu besiegen. Allerdings war sein
"Convertible" Bot Dead of Code Red nicht wirklich gut
bereift, und so hatte er auch gegen code red zu wenig zu bieten ... Battle: Sumo Erbauer: Christian Techn. Ausrüstung: 2 Motore Fazit: Dead of code red? Noch nicht ... |
 |
| Master
of Disaster: Ein
simpler SumoBot, er fuhr ohne Steuerung stur geradeaus. Sein einziger
Pluspunkt war eine vorne befestigte zweckentfremdete Lego Garagenrampe,
welche den gegnerischen Bot unterfahren sollte. Allerdings war jeder
Gegner auf diese Art von Angriff vorbereitet ... Battle: Sumo Erbauer: David Techn. Ausrüstung: 2 Motore Fazit: stur geradeaus ... |
 |

 |
 |
Windmühle: Christian
hat auch bei diesem Bot tief in die Trickkiste gegriffen. Windmühle war
mit einem Codepilot ausgerüstet, dessen Motor die Windmühlflügel
angetrieben hat. Sonst blieb sein Bot unbeweglich stehen, die vier großen
Gummireifen an der Unterseite dienten nur als Bremse. Seine
Windmühlflügel sollten gegnerische Bots umwerfen ... Battle: Sumo Erbauer: Christian Techn. Ausrüstung: 1 Motor (Codepilot) Fazit: schön ist so ein Ringelspiel ... |


 |
|
|
Action! (Sumo):
Auf einem kreisrunden Spielfeld von einem Meter Durchmesser ging es gleich zur Sache. Die Grezwerte für die Bots dieser Battle
waren maximal 20 cm Aussenmaße und ein Höchstgewicht von 2,5 kg. Die Gegner
stellten sich in 20 cm Abstand voneinander auf und los ging es ... Hat es ein Bot geschafft, den Anderen innerhalb von 2 Minuten vom Spielfeld zu drängen, war er Sieger (3 Punkte), sonst war es ein Untentschieden (2 Punkt für jeden). Wieder spielten die Bots jeweils gegen jeden der anderen Bots. code red und sein erklärter Gegner Dead of Code Red waren eine Klasse für sich und kämpften um den Sieg, die Windmühle konnte ihre Flügel allerdings nicht einsetzen, keiner der anderen Bots kam in ihre Reichweite und Master of Disaster war zu leicht und konnte daher keinen Bot gefährden! Das Endergebnis unserer vierten SumoBattle war folgendes: 1. code red, 2. Dead of Code Red, 3. Windmühle
|
|
 (fast) alle Bots ...  (fast) alle Spieler |
Action!
(Marble): Lange nach dem
geplanten Termin ging es dann doch noch los. Es wurden jeweils zwei Kämpfe ausgetragen,
jeder hatte einmal die schwarzen und einmal die weissen Kugeln. Auf unserem
neuen, glatten Spielfeld haben die Kugeln allerdings oft ein Eigenleben
entwickelt. Dadurch war die Kugelausbeute manchmal sehr dem Zufall
überlassen. Nach 16 Zweikämpfen im Doppel-KO-System standen sich dann Tohuwabohu und Notlösung im Finale gegenüber, welches Tohuwabohu schließlich für sich entscheiden konnte. Das Endergebnis dieser Battle war folgendes: 1. Tohuwabohu 2. Notlösung 3. Blackbox |
| Fazit:
Wieder eine Battle geschafft und es hat Spass gemacht! Wieder
hatten wir viele Bots (16!) bei einer Battle. Genug Kugeln gesammelt, das nächste mal werden wir wieder Würfel sortieren ... Anbei einige Excel Files zur Verwaltung von mehreren Spielern im direkten Vergleichskampf. |
MS-Excel97: für ... 8 Spieler 16 Spieler Sumo |
| Danksagung: (thnx
Georg!) Wir danken der Firma LEGO, welche diese Robobattle großzügig mit Preisen gesponsort hat! |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
7.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
7.wiener battle ![]() sensoren
sensoren










{kind=link}
{kind=link}
{kind=link}