roboter
![]()
Lego
RCX
Technik
La Linea

|
La
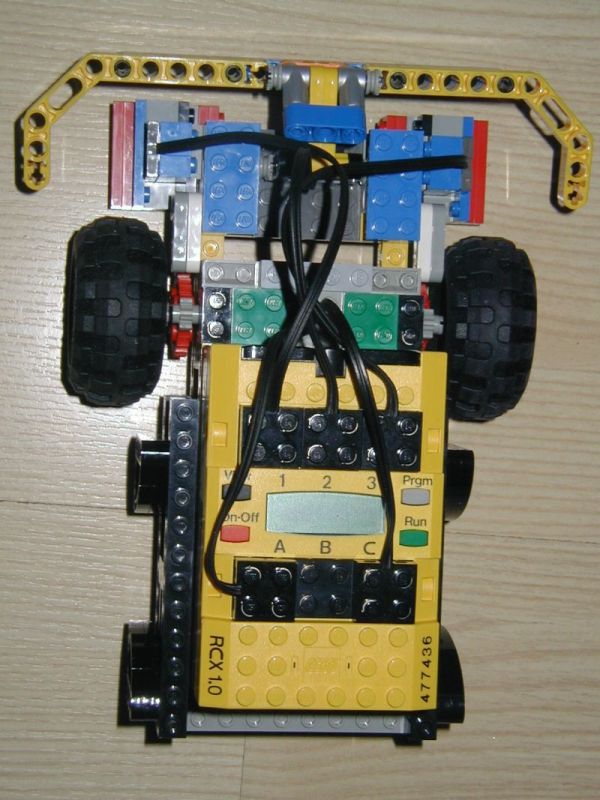
Linea: Dieser LineFollower wurde für die 4. Wiener RobotChallenge /
Slalom und Slalom Enhanced der InnoC.at (Österreichische Gesellschaft für innovative
Computerwissenschaften) gebaut. Er ist die
Weiterentwicklung des Fast-Line-LineFollower-Bots der 10. Wiener LEGO
Mindstorms Robo Challenge. Nachdem bei dieser Challenge (Slalom Enhanced) auf der Linie Hindernisse aufgebaut waren, hat La Linea (eigentlich La Linea2) an der Vorderseite eine Stoßstange mit Taster angebaut gehabt. Beim Auftreffen auf ein Hindernis hat er dieses großräumig umfahren. Um die Fehler des vergangen Jahres nicht zu wiederholen (Probleme der Lichtsensoren mit der relativ dünnen Linie) habe ich diesmal die Lichtsensoren gegen Fremdlicht abgeschotet. Dadurch wurde die schwarze Linie auch bei Scheinwerferlicht der Fernsehkameras einwandfrei erkannt. Allerdings war La Linea allerdings immer noch langsamer als einige seiner Gegner unterwegs! Battle: LineFollower siehe auch --> 4. Wiener RobotChallenge Fazit: geschwinder werden ... |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||



|
| Download Files für: ... |
roboter
![]()