roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
10..wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
10..wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
10. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Info: Spieldetails
LineFollowerBots:
Robot: 3-Auge
Robot: Fake
Robot: FastLine
Robot: La Linea
Robot: Line 1
Robot: Line 2
Robot: Speedy
Robot: Tell
Robot: VCE
Robot: Wingingit
WürfelStaplerBots:
Robot: Shaky
Robot: Versuch 1
Robot: Vielleicht ...
andere Bots:
Robot: FCP
Robot: ZeitnehmerBot
Start der Battle: Action! (LineFollower)
Start der Battle: Action! (WürfelStapler)
Was haben wir daraus gelernt?: Fazit
Ende: Danksagung
Archiv: Info zur Robo-Battle
am. 28. 05. 2005
 |
Vormittag:
Es war es wieder soweit! Diesmal trafen sich wieder 8 Teams und brachten insgesamt 15 BattleBots mit! Für den internationalen Anstrich dieser Battle sorgte Steve und Patric, welche eigens für diesen Wettkampf nach Wien geflogen kamen! Thx Steve! Eigentlich waren alle LineFollower-Bots mechanisch fertig, auch an der Software wurde nur mehr wenig gearbeitet. Die Ausnahme waren da nur die Würfelstapler, an denen wurde noch ganz heftig geschraubt! Wir haben also nur mit einer 1-stündigen Verspätung angefangen ... |



|
| Spieldetails
LineFollower:
Zwei Roboter spielen jeweils wie bei einem Parallelslalom gegeneinander. Das Ziel ist es,
der schwarzen Linie bis ans Ende zu folgen, dort den grünen Querstrich zu
überwinden, umzudrehen und so schnell als möglich wieder zum Start
zurückzukommen ...
Spieldetails WürfelStapler: In jeder Battle werden zwei Roboter in diagonal gegenüberliegenden Ecken aufgestellt und zeigen in die Mitte des Spielfeldes. Nun sollen die Roboter die Würfel sammeln, zu Türmen aufeinanderstapeln und den Turm frei stehen lassen. Nach drei Minuten werden die Roboter gestoppt und die Anzahl der Türme und der Würfel gezählt. Die gestapelten Würfel müssen sich einwandfrei ausserhalb des Roboters befinden ... |
| 3-Auge: Sascha
hat eine vertikale Variante eines Linefollowers gebaut. 3-Auge hat
mit seinen beiden Lichtsensoren die schwarze Linie in die Mitte genommen.
Auf zwei Rädern hat er meistens recht gute Ergebnisse vorzuweisen, nur
manchmal hat 3-Auge die Bahn gewechselt und ist auf der anderen
Bahn zurückgefahren ... Battle: LineFollower Erbauer: Sascha Technische Ausrüstung: 2 Motore, 2 Lichtsensoren Bewertung: meistens ging alles wie gewünscht ... |
 |



|
 |
Fake:
Für Fake habe ich erstmals den "Record and
Play"-Motor von LEGO verwendet. Dieses Ding hat zwei Motoren,
Sensoren und Logik eingebaut. Er soll eine einmal eingegebene Bewegung
immer wieder richtig wiedergeben. Soll! Also bin ich mit Fake die
schwarze Linie eimal per Hand nachgefahren und habe sie so
"eingegeben". Leider waren die Ergebnisse, das "Record and
Play", nicht sehr überzeugend und Fake war eher ziellos auf
dem Spielfeld unterwegs. Der RCX war nur zur Tarnung aufgebaut ... Battle: LineFollower Erbauer: Mike Technische Ausrüstung: 2 Motore, 0 Lichtsensor Bewertung: als Pausenclown einwandfrei einsetzbar ... |



|
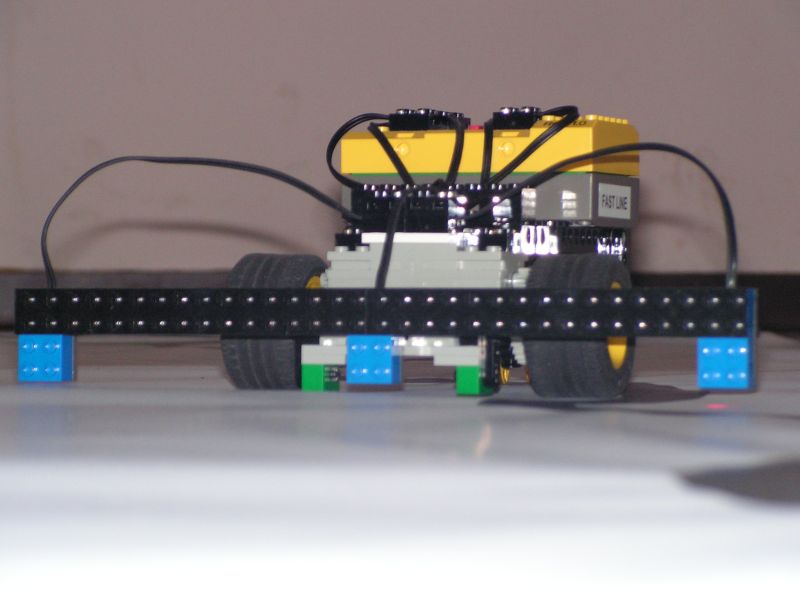
| FastLine: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. FastLine hat drei
Lichtsensoren, welche noch dazu sehr weit auseinander stehen. Damit hat er
sich auch an der schwarzen Linie orientiert, aber durch den großen
Abstand der Lichtsensoren mußte er nicht so oft wie andere Bots lenken
(und damit abbremsen). Der mittlere Lichtsensor war nur zur Erkennung der grünen Linie eingebaut ... Techn. Ausrüstung: 2 Motore, 3 Lichtsensoren Fazit: über den Sieger kann man nur Gutes sagen ... |
|



|
 |
La Linea: Lukas
hat mit La Linea einen kleinen Bot gebaut, der ähnlich wie viele
Andere aufgebaut war. Leider hat das verwendete Programm den Bot immer
wieder nur im Kreis gesteuert und hat die schwarze Linie ignoriert ... Battle: LineFollower Erbauer: Lukas Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: Tanzmaus, immer im Kreis herum ... |


 |
| Line 1: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. Line 1 hat nur
einen Lichtsensor eingebaut. Er hat sich daher am rechten Rand der
schwarzen Linie orientiert und ist brav, aber langsam, seinen Weg
dahingezuckelt ... Battle: LineFollower Erbauer: Mike Techn. Ausrüstung: 2 Motore, 1 Lichtsensor Fazit: Zitterpartie ... |
|

 |
|
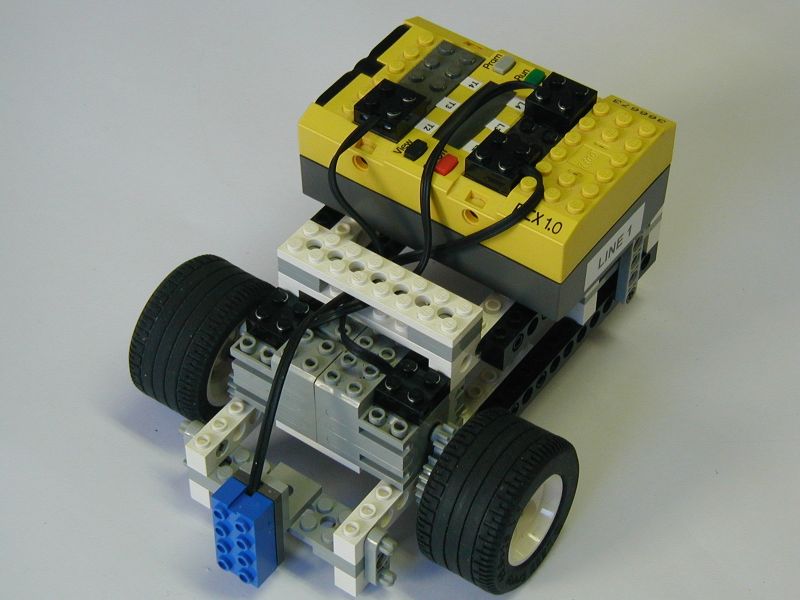
Line 2: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. Line 2 hat zwei
Lichtsensoren eingebaut. Damit hat die schwarze Linie in die Mitte
genommen und einwandfreie Ergebnisse geschafft ... Battle: LineFollower Erbauer: Mike Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: simpel, einfach und schnell ... |


 |
| Speedy: Steve
und Patric hatten zwar unterschiedliche Fahrwerke bei ihren Bots,
allerdings die gleiche Anordnung der Lichtsensoren. Speedy hatte
zwei sehr eng beieinanderliegende Lichtsensoren, welche beide gleichzeitig
die schwarze Linie erkennen konnten. Das Programm hat am Zustand der Lichtsensoren (ws-sw, beide sw, sw-ws) immer erkannt, ob sich der Bot an der linke Seite, in der Mitte oder an der rechten Seite der schwarzen Linie befand. Dadurch kam Speedy mit einer geringeren Anzahl von Lenk/Abbremsaktionen aus ... Battle: LineFollower Erbauer: Patric Technische Ausrüstung: 2 Motore, 2 Lichtsensoren Bewertung: schied erst im Familienmatch aus ... |
 |


 |
 |
Tell: Steve
und Patric hatten zwar unterschiedliche Fahrwerke bei ihren Bots,
allerdings die gleiche Anordnung der Lichtsensoren. Tell hatte zwei
sehr eng beieinanderliegende Lichtsensoren, welche beide gleichzeitig die
schwarze Linie erkennen konnten. Das Programm hat am Zustand der Lichtsensoren (ws-sw, beide sw, sw-ws) immer erkannt, ob sich der Bot an der linke Seite, in der Mitte oder an der rechten Seite der schwarzen Linie befand. Dadurch kam Tell mit einer geringeren Anzahl von Lenk/Abbremsaktionen aus. Sein größter Vorteil war allerdings, daß er an der grünen Linie eine perfekte Wende durchführte. Dadurch war Tell wesentlich schneller an der Schleife fertig, als alle anderen Bots, die die Schleife ausfuhren ... Außerdem danken wir Steve, der für jeden Teilnehmer dieser Battle als Gastgeschenk ein schweizer Taschenmesser spendiert hat! Battle: LineFollower Erbauer: Steve Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: der Bot mit der schönsten Wende ... |



 |
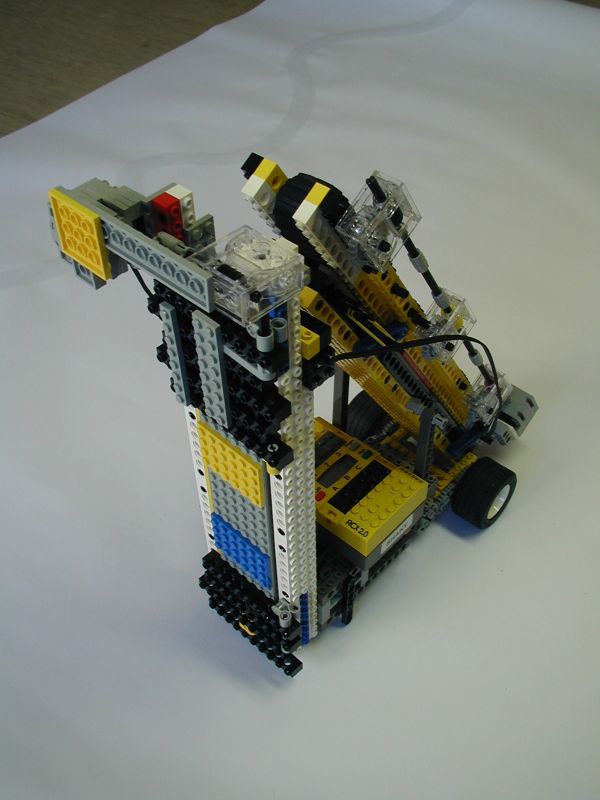
| VCE
(Vertical Curve Explorer): Bernhard
und Andy haben die zweite vertikale Variante eines Linefollowers gebaut.
Bei ihrem VCE im StarWars-Look war die Hardware von Bernhard und die
Software von Andy beigesteuert. Unüblicherweise hat dieser Bot von Anfang
an funktioniert ... Battle: LineFollower Erbauer: Bernhard & Andy Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: von Anfang an schön unterwegs ... |
 
|




|
 |
Wingingit: Christian
hat, wie nicht anders zu erwarten, die Regeln sehr frei ausgelegt. Sein Wingingit,
auf dem Laufwerk von La Linea von Lukas aufgebaut, hatte überhaupt
keine Lichtsensoren mehr in Betrieb. Er ist stur geradeaus gefahren, hat
dem grünen Strich überquert und ist anschließend (zeitgesteuert) ohne
Wende wieder zurückgefahren. Die allgemeine Meinung war, daß dies nicht dem Geist des Wettkampfes enstspricht. Aus diesem Grund wurde Wingingit aus der Wertung genommen ... Battle: LineFollower Erbauer: Christian Techn. Ausrüstung: 2 Motore, 0 Lichtsensor Fazit: ein typischer "Cristian-Bot" ... |

 |
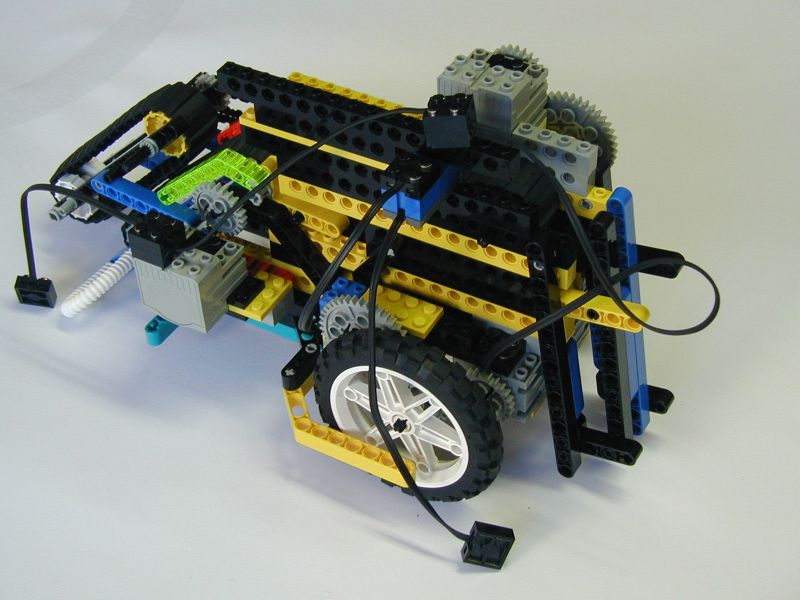
| Shaky: Dieser
Bot ist zum Stapeln von Würfeln gedacht. Shaky sammelt vorne die
Würfel ein und transportiert sie über eine schräge Rampe mittels
Raupenketten in die Höhe. Dort fallen die Würfel in einen
senkrechten Schlitz, in dem drei Würfel nebeneinander Platz haben. Damit
sich die Würfel nicht im Schlitz verklemmen, sorgt ein seitlich
angebrachter Motor mit Exzenter für rüttelnde Bewegungen. Nach drei
Minuten öffnet ein weiterer Motor die Klappe am Schlitz und Shaky
läßt (hoffentlich) einen Dreier-WürfelStapel stehen ... Battle: WürfelStapler Erbauer: Mike Techn. Ausrüstung: 5 Motore, 2 Taster, 1 Rotationssensor Fazit: ohne Wertung ... |
|


 |
|
Versuch 1: Sascha
hat sich mit seinem Versuch 1 auch an die Würfelstapler gewagt. Er
transportiert über zwei gegengleich laufende Gummiraupen die Würfel in
die Höhe. Dort laufen sie über eine waagrechte Gummiraupe am Lichtsensor
vorbei und fallen anschließend in einen senkrechten Käfig. Dieser wird
nach der eingestellten Zeit aufgeklappt und der Stapel bleibt frei stehen
... Battle: WürfelStapler Erbauer: Sascha Techn. Ausrüstung: 4 Motore, 1 Lichtsensor, 1 Rotationssensor Fazit: ohne Wertung ... |



 |
| Vielleicht
beim nächsten Mal: Bernhard
kam mit einem fast fertigen Bot zur WürfelStaplerBattle. Allerdings hat
er die Würfelgröße der vergangenen Battle genommen, Diesmal waren die
Würfel jedoch sehr viel kleiner! Vielleicht ... war so gedacht: zwei Gummiraupen fassen einen Würfel und heben ihn in die Höhe. Wenn der nächste Würfel eingefangen ist, werden die bereits gesammelten Würfel auf diesen aufgesetzt und der Stapel gemeinsam wieder hochgehoben. Am Ende der Zeit sollte der Stapel wieder am Spielfeld aufgesetzt werden ... Battle: WürfelStapler Erbauer: Bernhard Techn. Ausrüstung: 4 Motore, 2 Lichtsensoren, 1 Rotationssensor Fazit: ohne Wertung ... |
|



 |
|
FCP (Fancy
Cheerleader Pod): Bernhard war diesmal sehr
produktiv und kam mit einem weiteren Bot zur Battle. Allerdings war sein FCP
kein aktiver Teilnehmer an einem Wettkampf! Vielmehr war er nur zur
Aufmunterung der anderen Bots / Spieler gedacht. Als Cheerleader kam FCP
nur am Spielfeldrand zum Einsatz. Eine wirklich nette Idee von Bernhard! Battle: keine Erbauer: Bernhard Techn. Ausrüstung: 1 MicroScout Fazit: ein Wettkampf ohne Cheerleader ist nix ... |



 |
| ZeitnehmerBot: Extra
für die LineFollowerBattle habe ich diesen Bot gebaut. Seine Aufgabe war
es, den Sieger der LineFollower zu ermitteln. ZeitnehmerBot besteht aus jweiles zwei Masten, zwischen denen ein waagrechter Balken beweglich montiert ist. An diesem Balken hängen viele Technikachsen als Fühler herunter, die durch einen durchfahrenden LineFollower betätigt wurden. Ein am Balken angebrachter Lichtsensor erkennt dadurch den Start- als auch Zieldurchgang des Bots. Als Ergebnis gibt ZeitnehmerBot entweder am Display die Durchgangszeiten aus oder zeigt den Sieger nur durch zwei Lampen an ... Battle: keine Erbauer: Mike Techn. Ausrüstung: 2 Lichtsensoren Fazit: Tick, Tack ... |
|




 |
 Photo-Finish! |
Action! (LineFollower): Auf
zwei Spielflächen ging es im Doppel-KO-System gleich zur Sache! Jeweils
zwei Bots traten gegeneinander an. Dabei zeigte sich, daß fast alle Bots
die Strecke einwandfrei meisterten, nur die Wendeschleife mit dem grünen
Querstrich machte manchen Teilnehmern Probleme. Nach vielen Zweikämpfen im Doppel-KO-System standen sich dann FastLine und Tell im Finale gegenüber, welches FastLine schließlich für sich entscheiden konnte. Das Endergebnis dieser Battle war folgendes: 1. FastLine, 2. Tell, 3. Line 2 |
 die drei Nicht-Teilnehmer |
Action!
(WürfelStapler): In
unserem üblichen Spielfeld (2m x 2m, 2x50 Würfel) sollten jeweils 2 Bots
aufeinandertreffen. Leider waren die drei Teilnehmer allerdings nur fast fertig. Also haben wir diese Battle auf das nächste Zusammentreffen verschoben ... |
| Fazit:
Wieder eine Battle geschafft und es hat Spass gemacht! Unsere 12 Teams
brachten insgesamt 22 BattleBots mit! Der LineFollower-Wettbewerb hat allen Spaß gemacht und wird beim nächsten mal sicher wiederholt. Allerdings wurde eine schwierigere Strecke (um die Ecke, Hindernisse, udgl.) gefordert ... Anbei einige Excel Files zur Verwaltung von mehreren Spielern im direkten Vergleichskampf. |
MS-Excel97: für ... 8 Spieler 16 Spieler Sumo |
| Danksagung: Wir danken der Firma LEGO (Danke! an Kate), welche diese Robobattle großzügig mit Preisen gesponsort hat! |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
10.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
10.wiener battle ![]() sensoren
sensoren





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}