roboter ![]() @mike's page > hobbies
> mindstorms > robo-challenge >
11..wiener battle
@mike's page > hobbies
> mindstorms > robo-challenge >
11..wiener battle
Lego
RCX
Technik
11. WIENER
LEGO MINDSTORMS ROBO-CHALLENGE
BEIM SPIELEFEST IN WIEN
Vorbereitungen: Vormittag
Info: Spieldetails
LineFollowerBots:
Robot: Claw 1
Robot: Claw 2
Robot: FastLine
Robot: Line 1
Robot: Line 2
Robot: LineTracker
Robot: Wing
Start der Battle: Action! (LineFollower)
Was haben wir daraus gelernt?: Fazit
Ende: Danksagung
Archiv: Info zur Robo-Battle
am. 28. 05. 2005
 ideales Wetter für's Spielefest |
Vormittag:
Diesmal war alles anders als sonst! Auf Einladung des Veranstalters des Spielefestes in Wien (http://www.spielefest.at) habe ich diesmal eine Mini LEGO Mindstorms Robo Challenge, nur zu Demonstrationszwecken, abgehalten. Das war nur ein Probelauf um dem Publikum das Thema näher zu bringen. Es ist vorgesehen, beim nächsten Spielefest in Wien in 2006, so eine RoboChallenge zu starten. Dort soll dann jeder mit eigenem Material teilnehmen können. Also haben Martin und ich am Samstag und Sonntag unser Spielfeld aufgebaut, haben für einige Stunden unsere Roboter herumfahren lassen und gaben während der Zeit bereitwillig den Zusehern Auskunft ... |




 während die Kinder an der Riesenspinne bauten, haben wir unser Spielfeld aufgebaut ... |


 zwar nicht LEGO,
zwar nicht LEGO, aber Anker Steinbaukästen gefallen mir auch sehr gut! |

|
| Spieldetails LineFollower: Zwei Roboter spielen jeweils wie bei einem Parallelslalom gegeneinander. Das Ziel ist es, der schwarzen Linie bis ans Ende zu folgen, dort den grünen Querstrich zu überwinden, umzudrehen und so schnell als möglich wieder zum Start zurückzukommen ... |
| Claw 1: Martin
hat diesmal nicht auf sein bewährtes modulares Raupensystem
zurückgegriffen sondern hat zwei vollkommen neues Roboter gebaut. Sein Claw 1 hatte in V-Form angeordnete große Antriebsräder und zwei Lichtsensoren. Battle: Line Follower Erbauer: Martin Technische Ausrüstung: 2 Motore, 2 Lichtsensoren Bewertung: meistens ging alles wie gewünscht ... |
 |



|
|
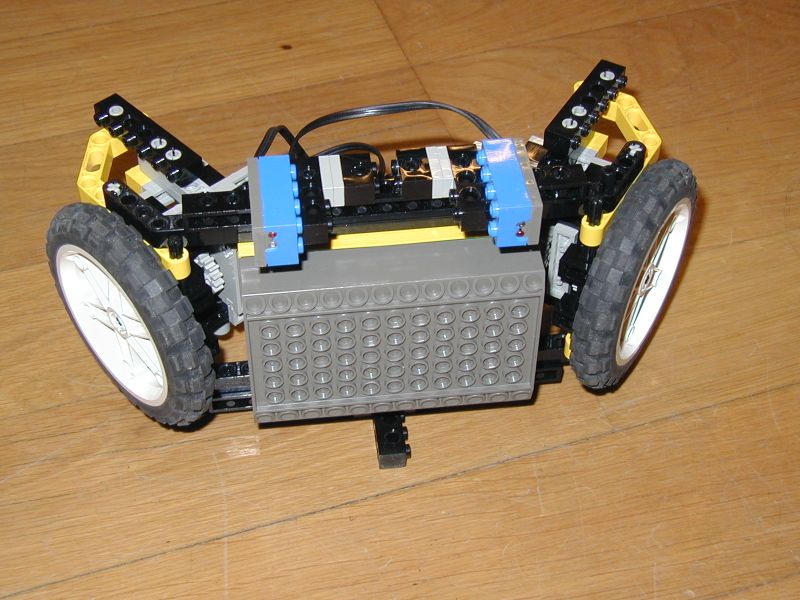
Claw 2:
Martin hat diesmal nicht auf sein bewährtes modulares Raupensystem
zurückgegriffen sondern hat zwei vollkommen neues Roboter gebaut. Sein Claw 2 hatte in V-Form angeordnete große Antriebsräder und zwei Lichtsensoren. Battle: LineFollower Erbauer: Mike Technische Ausrüstung: 2 Motore, 2 Lichtsensor Bewertung: meistens ging alles wie gewünscht ... |
|
|
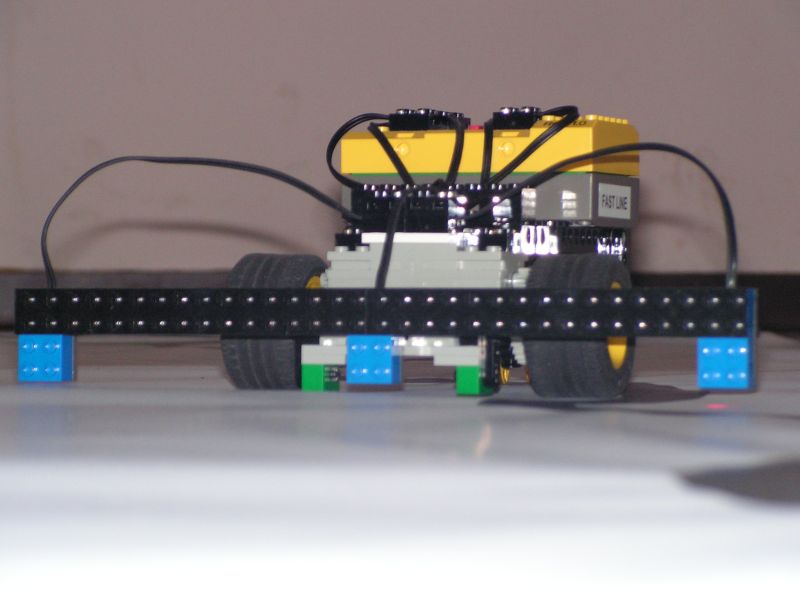
| FastLine: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. FastLine hat drei
Lichtsensoren, welche noch dazu sehr weit auseinander stehen. Damit hat er
sich auch an der schwarzen Linie orientiert, aber durch den großen
Abstand der Lichtsensoren mußte er nicht so oft wie andere Bots lenken
(und damit abbremsen). Der mittlere Lichtsensor war nur zur Erkennung der grünen Linie eingebaut ... Techn. Ausrüstung: 2 Motore, 3 Lichtsensoren Fazit: über den Sieger kann man nur Gutes sagen ... |
 |



|
|
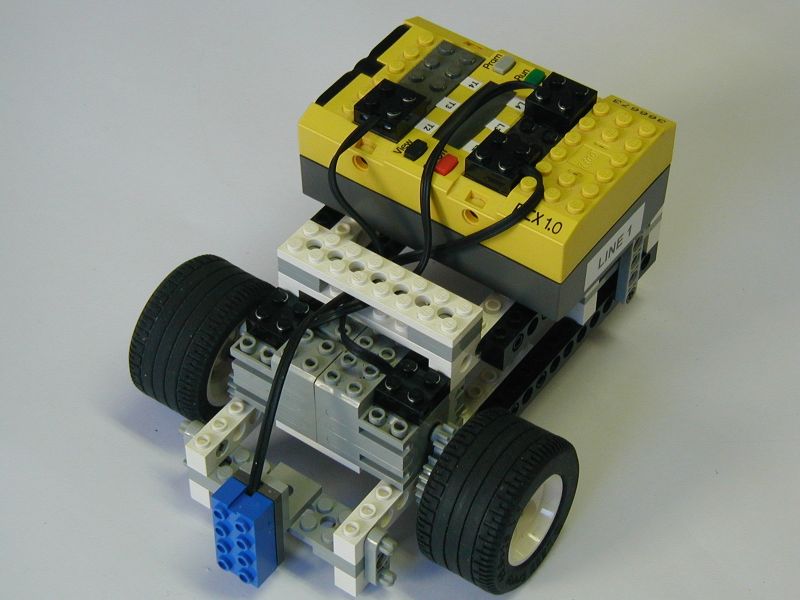
Line 1: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. Line 1 hat nur
einen Lichtsensor eingebaut. Er hat sich daher am rechten Rand der
schwarzen Linie orientiert und ist brav, aber langsam, seinen Weg
dahingezuckelt ... Battle: LineFollower Erbauer: Mike Techn. Ausrüstung: 2 Motore, 1 Lichtsensor Fazit: Zitterpartie ... |

 |
| Line 2: Dieser
Bot ist einer von drei baugleich aufgebauten Linefollowern. Nur bei der
Anzahl der Lichtsensoren unterscheiden sie sich. Line 2 hat zwei
Lichtsensoren eingebaut. Damit hat die schwarze Linie in die Mitte
genommen und einwandfreie Ergebnisse geschafft ... Battle: LineFollower Erbauer: Mike Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: simpel, einfach und schnell ... |
|


 |
|
LineTracker: Um
einen weiteren Teilnehmer für unsere Vorführung zu haben, habe ich noch
schnell am Samstag um Mitternacht diesen Bot gebaut. Er sit mit Raupen
ausgerüstet und hat auf beiden Seiten einen Lichtsensor montiert. Von der
Funktion her ähnlich Line 2 hat er allerdings auf dem schmutzigen
Spielfeld viel zu wenig Gripp gehabt und war dementsprechend
langsam. Battle: LineFollower Erbauer: Mike Technische Ausrüstung: 2 Motore, 2 Lichtsensoren Bewertung: simpel, einfach und langsam ... |
| Wing: Christian
hat diesmal alleine an seinem Wing gabaut. Er sah dem Vorgänger der
letzten Battle sehr ähnlich, war aber diesmal wirklich darauf ausgelegt
die schwarze Linie zu erkennen. Da Christian zum Organisationsteam des
Spielefestes gehört und deshalb auch tagelang vorher im Einsatz war,
blieb ihm für die Software keine
Zeit, also habe ich schnell was programmiert. Im Betrieb hat sich allerdings gezeigt, daß Wing's breite Ausleger mit den Stützrädern nur gestört haben - also habe ich sie abmontiert. Auch bei der Fahrtrichtung habe ich eine Änderung gemacht, wenn man Wing sozusagen im Rückwärtsgang betrieben hat war er wesentlich besser am Spielfeld unterwegs! Battle: LineFollower Erbauer: Christian & Mike Techn. Ausrüstung: 2 Motore, 2 Lichtsensoren Fazit: wenn man alles Unnötige wegnimmt funktioniert er nicht so schlecht ... |
 |


 |
 Start und GO! |
Action! (LineFollower): Auf
zwei Spielflächen ging es im Parallelslalom gleich zur Sache! Jeweils
zwei Bots traten gegeneinander an. Dabei zeigte sich, daß fast alle Bots
die Strecke einwandfrei meisterten, nur die Wendeschleife mit dem grünen
Querstrich machte manchen Teilnehmern Probleme.
Nach zwei Tagen Dauerbetrieb hat es sich gezeigt, daß alle Bots die
Strecke einwandfrei meisterten, mal schneller, mal langsamer. Allerdings
hat das Spielfeld durch viele Besucher, die es als
"Wanderstrecke" benutzten und das Spielfeld arg verschmutzten,
sehr gelitten. |
| Fazit:
Wieder eine Battle geschafft und es hat Spass gemacht! Unsere 3 Teams
brachten insgesamt 7 BattleBots mit! Der LineFollower-Wettbewerb hat allen Mitspielern wie auch Zusehern Spaß gemacht und wird beim nächsten Spielefest hoffentlich wiederholt. |
| Danksagung: Wir danken dem Wiener Spielekreis, die uns diese RoboChallenge ermöglichten und ich freue mich schon auf's nächste Spielefest, wo wir dann hoffentlich mit großer Beteiligung eine weitere Challenge machen |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-challenge >
11..wiener battle
@mike's page > hobbies
> mindstorms > robo-challenge >
11..wiener battle