roboter
![]()
![]() sensoren
sensoren
Lego
RCX
Technik
8. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Info: Spieldetails
WürfelBots:
Robot: Abgesägte Schrottflinte
Robot: Blöd
Robot: Cube I
Robot: Cube II
Robot: Cube III
Robot: Cutor
Robot: Dr. Remix
Robot: EV-9D9
Robot: Fun Company 1
Robot: Fun Company 2
Robot: Ganz Blöd
Robot: Ice Cube
Robot: Ice T
Robot: kein Skorpion mehr
Robot: Sly
Robot: Stuart Little
SumoBots:
Robot: code red
Robot: Death of Code Red 2
Robot: EV-8D8
Robot: Master of Disaster
Robot: Wirbelwind
SpyBots:
Robot: Nicht Blöd
Robot: Spy I
Robot: Spy II
Start der Battle: Action! (Sumo)
Start der Battle: Action! (Würfel)
Start der Battle: Action! (SpyBots)
Was haben wir daraus gelernt?: Fazit
Ende: Danksagung
Archiv: Info zur Robo-Battleam. 16. 02. 2003
 | Vormittag: Am 16. 2. 2003 war es wieder soweit! Diesmal trafen sich 12 Teams und brachten insgesamt 24 BattleBots mit! Mechanisch waren diesmal alle Bots fertig, nur an der Software wurde noch sehr viel geschraubt ... Wir haben also mit der üblichen 2-3 stündigen Verspätung angefangen ... |
     |
| Spieldetails Würfel: Zwei Roboter spielen jeweils gegeneinander. Das Ziel ist es, schwarze Würfel am Spielfeld einzusammeln und auf Deine Seite des Spielfeldes zu bringen. Gleichzeitig solltest Du alle weiße Würfel von Deiner Spielfeldseite beseitigen. Nach fünf Minuten bekommst Du für jeden schwarzen Würfel auf Deiner Spielfeldseite (egal ob im Bot oder außerhalb) einen Punkt und für jeden weißen Würfel auf Deiner Spielfeldseite (egal ob im Bot oder außerhalb) wird Dir ein Punkt abgezogen ... Spieldetails Sumo: In jeder Battle werden zwei Roboter im Abstand von zwanzig Zentimetern gegenüber aufgestellt. Das Ziel ist es, den geg nerischen Roboter vom Spielfeld zu drängen oder bewegungsunfähig zu machen. Nach zwei Minuten werden die Roboter gestoppt und die Punkte verteilt ... Spieldetails SpyBots: Ein Spybot spielt gegen die Zeit. Das Ziel ist es, einer geschwungenen Linie zu folgen.Die Zeit vom Start bis zum Ziel wird gemessen ... |
| Abgesägte Schrottflinte: Über diesen Bot gibt's nicht viel zu sagen. Er war absolut minimalistisch gebaut. 2 Motore, kein Sensor! Er fuhr geradeaus auf's Spielfeld und hat sich in Spielfeldmitte bis zum Ende der Battle wie wild gedreht. Dadurch hat er wahllos weiße und schwarze Würfel umhergeschossen. Battle: Würfel Erbauer: John Doe Technische Ausrüstung: 2 Motore Bewertung: da fällt mir nichts dazu ein ... |  |
 |
 | Blöd: Sascha's Bot hat an der Frontseite als Greifwerkzeuge zwei sich gegengleich drehende Reifen montiert. Dadurch hat er einen Würfel förmlich eingesaugt. Allerdings hat er ihn anschließend gleich wieder ausgespuckt, wenn's die falsche Farbe war. Leider war das System noch nicht ganz perfekt, auch die Software hatte noch Probleme (daher auch der eigenwillige Name!) ... Battle: Würfel Erbauer: Sascha Technische Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Bewertung: nette Idee, allerdings verbesserungswürdig ... |
  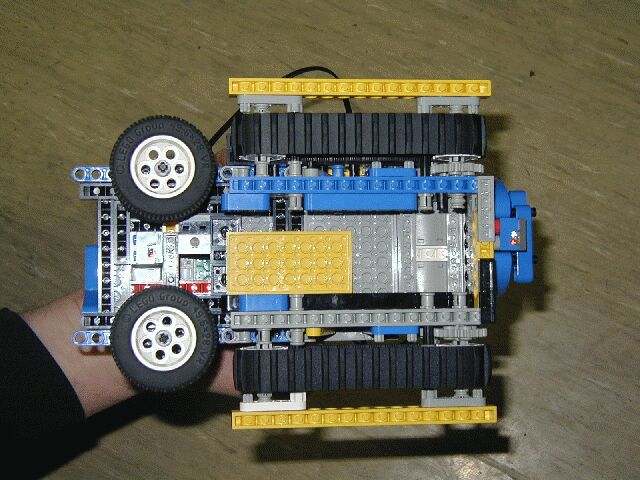 |
| Cube I: Einer von drei baugleichen Bots. Cube I basiert auf dem bewährten Chassis des letzten Dosensammlers, nur der Fangmechanismus wurde verbessert. Alles in allem hat Cube I recht gut funktioniert ... Battle: Würfel Erbauer: Mike Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: klein, fein, baugleich mit dem Sieger ... |  |
    |
| Cube II: Einer von drei baugleichen Bots. Cube II basiert auf dem bewährten Chassis des letzten Dosensammlers, nur der Fangmechanismus wurde verbessert. Alles in allem hat Cube II recht gut funktioniert und wurde auch späterer Sieger ... Battle: Würfel Erbauer: Mike Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: klein, fein, Sieger ... |
| |
| Cube III: Einer von drei baugleichen Bots. Cube III basiert auf dem bewährten Chassis des letzten Dosensammlers, nur der Fangmechanismus wurde verbessert. Alles in allem hat Cube III recht gut funktioniert ... Battle: Würfel Erbauer: Mike Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: klein, fein, baugleich mit dem Sieger ... | |
| |
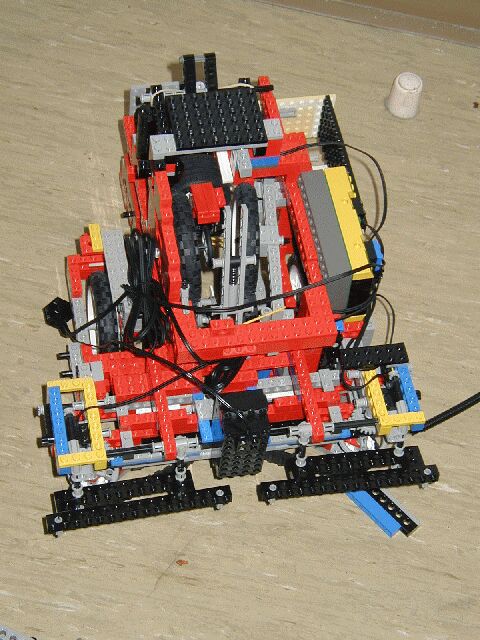
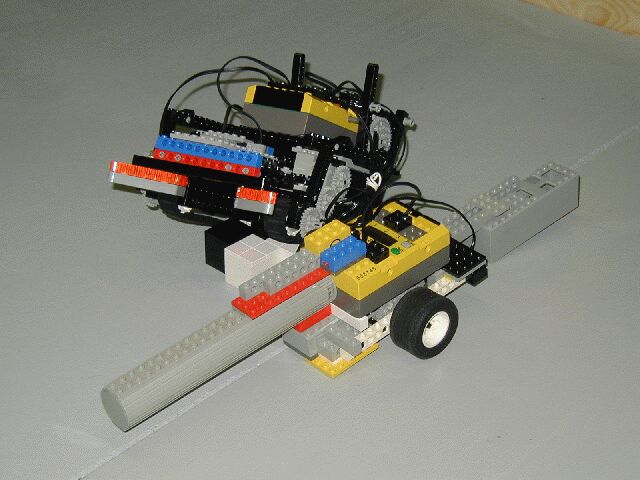
 | Cutor: Georg und Gynther haben uns diesmal wieder die Ehre gegeben. Und wie nicht anders zu erwarten, war auch diesmal ihr Bot wieder mit technischen Finessen ausgerüstet. Ihr Cutor hatte an der Vorderseite ein bewegliches Raupenpaar, welche die Würfel einfingen. Anschließen wurden sie zu einem Würfelaufzug weitergeleitet, der sie in die Höhe transportierte. Dort sollten die richtigen Würfel in einen Auffangbehälter fallen, die Falschen jedoch vorher von einem Reifen abgelenkt werden. Leider hat diese Weichenstellung nicht immer richtig funktioniert ... Battle: Wyrfel Erbauer: Georg & Gynther Techn. Ausrüstung: 5 Motore, 2 Taster, 2 Lichtsensor Fazit: die Idee des Sorters sollte noch überarbeitet werden ... |
    |
| Dr. Remix: Diesmal lag es an Thomas, einen Bot zu bauen, der wild um sich schoß. Sein Dr. Remix hat die Würfel vorne aufgenommen, sie per Raupe nach hinten befördert und dort wurden sie mit zwei gegengleich drehenden Reifen nach hinten ausgeschossen. Allerdings schoß sein Bot in jede Richtung und damit war die Punktevergabe ein Glücksspiel ... Battle: Würfel Erbauer: Thomas Technische Ausrüstung: 5 Motore, 2 Taster, 1 Lichtsensor Bewertung: Zielwasser wäre gut gewesen ... |  |
  |
 | EV-9D9: Christian und Lukas haben einen Convertible- Bot gebaut. Als EV-9D9 hat er Würfel gesammelt, als EV-8D8 und ohne Würfelauffangbehälter war er als SumoBot unterwegs. Richtig überzeugt hat er allerdings nirgends ... Battle: Würfel Erbauer: Christian & Lukas Techn. Ausrüstung: 3 Motore, 1 Taster, 1 Lichtsensor Fazit: use the Force, Luke ... |
  |
| Fun Company 1: Auch Andreas hat auf die bewährte Konstruktion seines Dosensammlers zurückgegriffen und hat nur minimale Änderungen gemacht. Nach anfänglichen Softwareproblemen hat er später recht gut funktioniert ... Battle: Würfel Erbauer: Andreas Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 1 Taster, 2 Lichtsensor Fazit: nicht so übel ... |  |
   |
 | Fun Company 2: Baugleich mit Fun Company 1 ... Battle: Würfel Erbauer: Markus Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 1 Taster, 2 Lichtsensor Fazit: nicht so übel ... |
| |
| Ganz Blöd: Sascha's zweiter Bot war vollkommen anders aufgebaut. Er hatte an der Front eine hebbare Türe, welche die richtigen Würfel fangen sollte. Leider war aber der Lichtsensor ungünstig angebracht und so funktionierte der ganze Bot nicht richtig ... Battle: Würfel Erbauer: Sascha Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Lichtsensor, 1 Rotationssensor Fazit: ... der nächste Bot wird besser! | |
  |
 | Ice Cube: Martin hat wie immer ganz auf seinen modularen Aufbau des Bots vertraut. Gefahren ist er ja recht gut, mit der Erkennung der Würfel hatte er allerdings große Probleme ... Battle: Würfel Erbauer: Martin Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: ... das falsche Modul genommen? |
  |
| Ice T: Baugleich mit Ice Cube ... Battle: Würfel Erbauer: Mike Techn. Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: ... das falsche Modul genommen? | |
| |
 | kein Skorpion mehr: Am Beginn hieß der Bot noch Skorpion, und sah auch danach aus. Nach diversen Umbauten war dann der Stachel, aber auch der Biß weg. Leider hat der Bot nie so funktioniert, wie es geplant war ... Battle: Würfel Erbauer: Bernhard Techn. Ausrüstung: 4 Motore, 2 Lichtsensor, 1 Rotationssensor Fazit: no Stachel, no points ... |
  |
| Sly: Silvester war bei dieser Battle leider verhindert. Aber er hat schon einmal mit einem Würfelbot für Aufsehen gesorgt. Zu klar überlegen war sein damaliger Bot. Also habe ich einfach seinen damaligen Bot nachgebaut und ihn blos für diese Battle adaptiert. Aus Zeitgründen wurde aber die Software nicht mehr komplett fertig, also hat Sly brav Würfel gesammelt, aber leider nicht richtig auf die Spielfelder aufgeteilt ... Battle: Würfel Erbauer: Mike / Silvester Techn. Ausrüstung: 4 Motore, 4 Taster, 2 Lichtsensor, 1 Rotationssensor Fazit: gute Hardware, schwache Software ... |  |
    |
 | Stuart Little: Diesmal war Klaus weit weniger gefährlich als bei der 7ten Battle unterwegs. Sein Bot hat diesmal nicht wild um sich geschossen. Allerdings sah man auch sonst wenig Action von Stuart Little ... Battle: Würfel Erbauer: Klaus Techn. Ausrüstung: 3 Motore, 2 Taster, 2 Lichtsensor Fazit: Tanzmaus ... |
  |
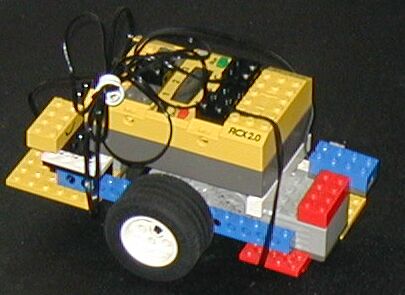
| code red: Dieser Bot hatte eine starre Hinterachse, an welcher zwei Motore mit hoher Übersetzung und Getriebebox befestigt waren. Um wenig Angriffsfläche zu bieten war code red sehr niedrig gebaut. Während der Battle wurde er noch aus Gewichtsgründen mit 4 gefüllten Batterieboxen bestückt ... Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 2 Motore Fazit: der einzig wahre Sieger ... |  |
   |
 | Death of Code Red 2: Christian kam wieder mit dem erklärten Vorsatz, code red zu besiegen. Sein Dead of Code Red 2 war diesmal wesentlich besser bereift als beim letzten mal. Auch hatte er als zusätzliche Waffe eine rotierende "Stoßstange", welche den Gegner in die Höhe heben sollte ... Battle: Sumo Erbauer: Christian Techn. Ausrüstung: 1 Motor (Codepilot), 5 Motore, 2 Lichtsensor Fazit: Dead of code red? Noch nicht ... |
   |
| EV-8D8: Christian und Lukas haben einen Convertible- Bot gebaut. Als EV-9D9 hat er Würfel gesammelt, als EV-8D8 und ohne Würfelauffangbehälter war er als SumoBot unterwegs. Seine einzige Waffe war die Flucht. Am Start der Battle fuhr er sofort aus der Schußlinie und stand still. Gegen solche inaktive Bots muß ich die Regeln anpassen! Battle: Sumo Erbauer: Christian & Lukas Techn. Ausrüstung: 3 Motore, 2 Lichtsensor Fazit: Feigheit vor dem Gegner ... | |
  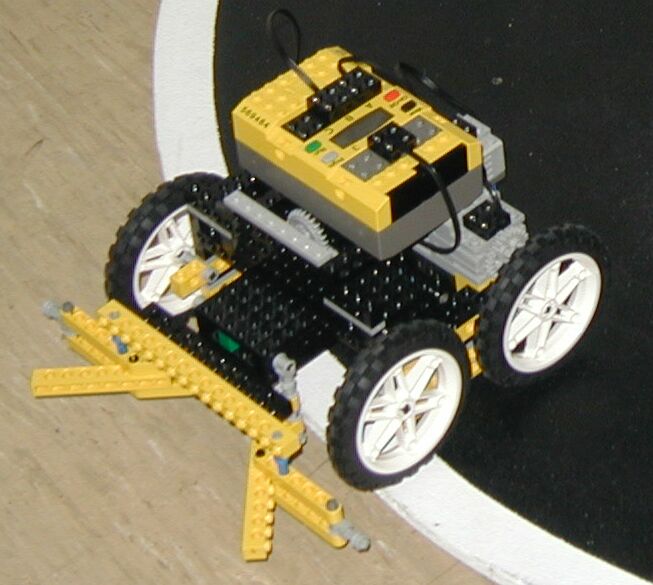 |
 | Master of Disaster: Ein simpler SumoBot, er fuhr ohne Steuerung stur geradeaus. Sein einziger Pluspunkt war eine vorne befestigte zweckentfremdete Lego Garagenrampe, welche den gegnerischen Bot unterfahren sollte. Allerdings waren viele Gegner auf diese Art von Angriff vorbereitet ... Battle: Sumo Erbauer: David Techn. Ausrüstung: 2 Motore Fazit: stur geradeaus ... |
  |
| Wirbelwind: Dieser Bot bestand aus einer gekürzten abgesägten Schrottflinte. Sein Heil bestand auch aus der Flucht! Gegen solche inaktive Bots muß ich die Regeln anpassen! Battle: Sumo Erbauer: John Doe Techn. Ausrüstung: 2 Motore, 1 Lichtsensor Fazit: Wirbelwind? Laues Lüftchen ... | |
  |
 | Nicht Blöd: Sascha hat bei diesem Spybot tief in die Trickkiste gegriffen und hat Nicht Blöd auf sechs Beinen laufen lassen ... Battle: SpyBot Erbauer: Sascha Techn. Ausrüstung: 1 Spybot (2 Motore, 1 Taster, Lichtsensor) Fazit: to be continued ... |
  |
| Spy I: Dieser Bot war das nur wenig veränderte Original, nur der Laser und der Lichtsensor zeigten zum Boden ... Spy I war gleichzeitig als "HausBot" gebaut, um mit der Fernsteuerung bei der Würfelbattle mitspielen zu können ... Battle: SpyBot Erbauer: Mike Techn. Ausrüstung: 1 Spybot (2 Motore, 1 Taster, Lichtsensor) Fazit: to be continued ... |  |
   |
 | Spy II: Auch dieser Bot konnte neben dem Linienverfolgen auch als Hausbot eingesetzt werden ... Battle: SpyBot Erbauer: Annabel Techn. Ausrüstung: 1 Spybot (2 Motore, 1 Taster, Lichtsensor) Fazit: to be continued ... |
   |
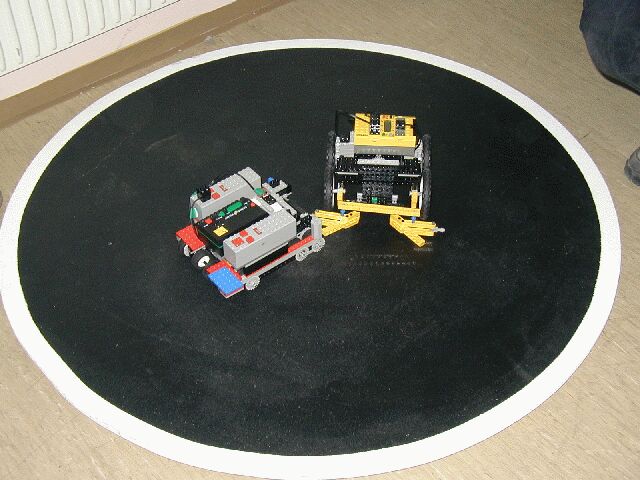
| Action! (Sumo): Auf einem kreisrunden Spielfeld von einem Meter Durchmesser ging es gleich zur Sache. Die Grezwerte für die Bots dieser Battle waren maximal 20 cm Aussenmaße und ein Höchstgewicht von 2,5 kg. Die Gegner stellten sich in 20 cm Abstand voneinander auf und los ging es ... Hat es ein Bot geschafft, den Anderen innerhalb von 2 Minuten vom Spielfeld zu drängen, war er Sieger (3 Punkte), sonst war es ein Untentschieden (2 Punkte für jeden). Wieder spielten die Bots jeweils gegen jeden der anderen Bots. Das Endergebnis unserer fünften SumoBattle war folgendes: 1. ex aequo code red, Dead of Code Red 2 und Wirbelwind
Dieses seltsame Ergebnis (3 punktegleiche Sieger) kam allerdings nur dadurch zu stande, daß einige Bots total defensiv eingestellt waren, am Start einen Schwenk auf die Seite machten und dann ihr Spiel beendeten. Mit Glück fuhr dann ihr Gegner aus dem Spielfeld und verlor. Da dieses Verhalten nicht meiner Vorstellung eines fairen Kampfes entspricht, werden die Sumoregeln für die nächsten Battles entsprechend abgeändert ... |
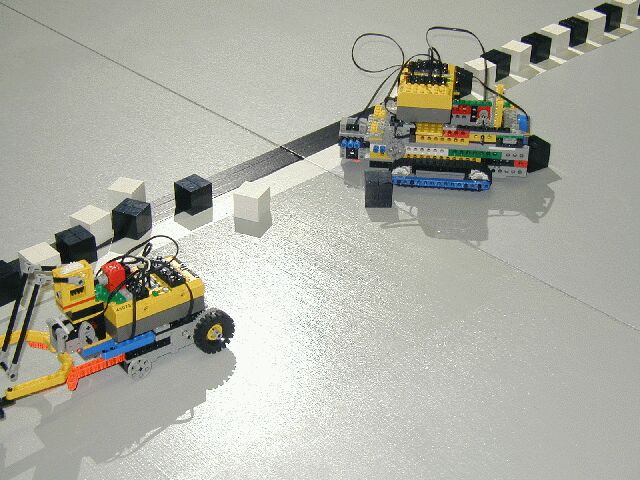 ... los geht's! | Action! (Würfel): Lange nach dem geplanten Termin ging es dann doch noch los. Diesmal gab es immer nur einen Kampf, jeder der Bots hatte ja das gleiche Ziel, die schwarzen Würfel. Unser Spielfeld war neu lackiert und hatte eine schwarz-weiße Trennlinie zwischen beiden Hälften. Die meisten Bots funktionierten fast so wie gewollt und sammelten immer wieder richtige Würfel. Nach vielen Zweikämpfen im Doppel-KO-System standen sich dann Cube II und abgesägte Schrottflinte im Finale gegenüber, welches Cube II schließlich für sich entscheiden konnte. Das Endergebnis dieser Battle war folgendes: 1. Cube II, 2. abgesägte Schrottflinte, 3. Sly |
|
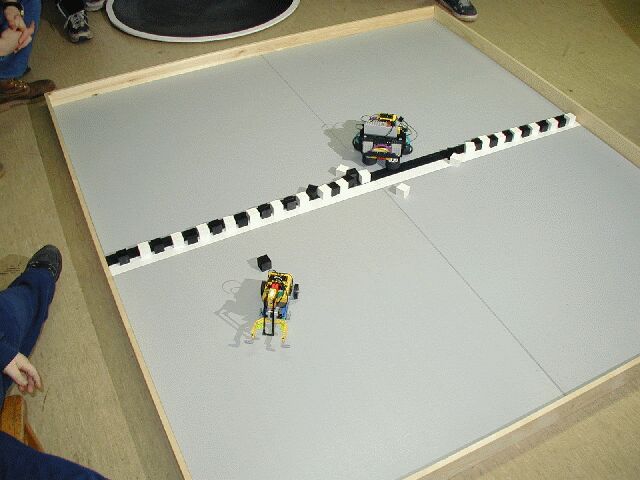
 Alle Spieler der 8ten RoboBattle | Action! (Spy): Erstmalig wollten wir auch eine SpyBots-Battle durchführen. Auf einem fünf Meter langen Spielfeld war eine geschwungene, drei Zentimeter breite Linie aufgedruckt. Dieser sollten alle Spys folgen und die Zeit wäre gestoppt worden. Durch die Verzögerung der anderen beiden Battles kamen die SpyBots allerdings nicht mehr zum Einsatz. Wir werden aber diesen Wettbewerb bei der nächsten Battle neu starten! Das Endergebnis dieser Battle war daher folgendes: 1. ex aequo Nicht Blöd, Spy I und Spy II |
| Fazit: Wieder eine Battle geschafft und es hat Spass gemacht! So viele Bots wie diesmal (24!) hatten wir noch nie! Die Punktevergabe war diesmal wesentlich einfacher gehalten und daher auch viel schneller berechnet! Für die nächsten Battles muß ich mir allerdings abgeänderte Regeln für Sumo einfallen lassen, diese inaktiven Bots waren eine Qual! Bei der nächsten (9ten!) Battle werden wir mal ganz was anderes machen, entweder stellen wir eine Aufgabe der "First Lego League" nach oder wir lassen uns eine andere Aufgabenstellung einfallen ... Anbei einige Excel Files zur Verwaltung von mehreren Spielern im direkten Vergleichskampf. | MS-Excel97: für ... 8 Spieler 16 Spieler Sumo |
| Danksagung: (Danke! an Pernilla) Wir danken der Firma LEGO, welche diese Robobattle großzügig mit Preisen gesponsort hat! |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]()
![]() sensoren
sensoren






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}