roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
6.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
6.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
6. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Info: Spieldetails
BillardBots:
Robot: BallBee
Robot: Ballklau
Robot: Dumm&Dümmer
Robot: Fieser Hund
Robot: Fishing Rod
Robot: Gynther's Special
Robot: Mean Machine
Robot: Ping
Robot: Pong
Robot: Schuss ins Blaue
Robot: WosWasI
SumoBots:
Robot: Goliath
Robot: Jin Sato
MiniSumo:
Robot: Fabian's Insekt
Robot: Markus's Arrow
Robot: Mike's Sledge3
Start der Battle: Action! (Sumo)
Start der Battle: Action! (MiniSumo)
Start der Battle: Action! (Billard)
Was haben wir daraus gelernt?: Fazit
Ende: Danksagung
Archiv: Info zur Robo-Battle
am. 3. 3. 2002
 |
Vormittag:
Am 3. 3. 2002 war es wieder soweit! Diesmal trafen sich 9 Teams und
brachten insgesamt 16 BattleBots mit! Mechanisch waren diesmal die meisten Bots fertig, nur an der Software wurde noch viel geschraubt ... Wir haben also mit der üblichen 1-2stündigen Verspätung angefangen ... |




 

|
| Spieldetails
Billard:
In jeder Battle werden zwei Roboter an den Schmalseiten eines
Billardtisches aufgestellt und zeigen in die Mitte des Spielfeldes. In Spielfeldmitte liegen 15 Golfbälle zu einem Dreieck angeordnet. Nun sollen
die Roboter die Bälle einsammeln und in die Ecklöcher (1 Punkt) bzw. in
die Mittenlöcher (2 Punkte) versenken. Nach fünf Minuten werden die Roboter gestoppt und die Anzahl
der Bälle gezählt ...
Spieldetails Sumo: In jeder Battle werden zwei Roboter im Abstand von zwanzig Zentimetern gegenüber aufgestellt. Das Ziel ist es, den gegnerischen Roboter vom Spielfeld zu drängen oder bewegungsunfähig zu machen. Nach zwei Minuten werden die Roboter gestoppt und die Punkte verteilt ... Spieldetails MiniSumo: Dieser
Wettbewerb ist nur für MicroScouts gedacht! |
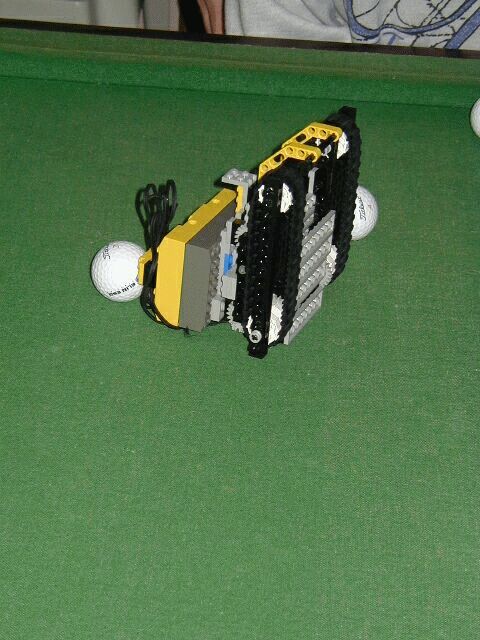
| BallBee:
Dieser Bot war der nur minimal abgeänderte CanBee-Bot der letzten
Dosenbattle. Gedacht war, den Ball über einen Lichtsensor zu erkennen, im
Käfig zu fangen und zum nächsten Loch zu transportieren. Im Laufe der
Battle hat es sich allerdings als wesentlich besser erwiesen, den Käfig
immer geschlossen zu lassen und den Bot nur als Schubraupe zu verwenden
... Battle: Billard Erbauer: Mike Technische Ausrüstung: 3 Motore, 1 Lichtsensor, 1 Rotationssensor Bewertung: simpel, aber gut ... (Battles / Bälle versenkt): (4 / 4 --> 1 Ball / Battle) |
 |




|
 |
Ballklau:
Auch Andreas hatte die Idee, seinen Doseneklau-Bot der letzten
Battle zum Ballklau dieser Battle umzubauen. Gedacht war, den Ball über
einen Lichtsensor zu erkennen, im Käfig zu fangen und zum nächsten Loch
zu transportieren. Im Laufe der Battle hat es sich allerdings als
wesentlich besser erwiesen, den Käfig immer geschlossen zu lassen und den
Bot nur als Schubraupe zu verwenden ... Battle: Billard Erbauer: Andreas Technische Ausrüstung: 3 Motore, 1 Lichtsensor, 1 Rotationssensor Bewertung: simpel, aber gut ... (Battles / Bälle versenkt): (4 / 6 --> 1,5 Bälle / Battle) |



|
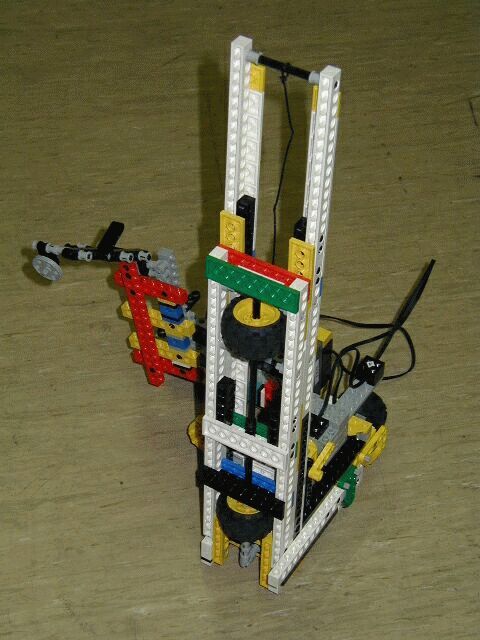
| Dumm&Dümmer: Bernhard
war das erste Mal bei einer RoboBattle dabei. Sein Bot sollte den Ball
einfangen und anschliessend mit einem kleinen Queue stoßen. Allerdings
war der Stoßmemchanismus nicht stark genug um dem Ball richtig Schwung zu
geben. Auch hatte Dumm&Dümmer Schwierigkeiten mit seiner Software ... Battle: Billard Erbauer: Bernhard Techn. Ausrüstung: 3 Motore, 2 Taster, 1 Lichtsensor Fazit: für den Anfang nicht so übel ... (Battles / Bälle versenkt): (2 / 1 --> 0,5 Bälle / Battle) |
 |


 |
 |
Fieser
Hund: Auch Sascha war erstmalig bei
uns. Er kam mit einem fertigen Bot für's Billardspielen und hatte
auch einen Pneumatikzusatz dabei, um den Bot auf Sumo umzurüsten. Leider
haben diese Modelle doch nicht wie gewünscht funktioniert. Also hat
Sascha noch vor dem Start seinen Bot komplett umgebaut. Es wurde nicht
mehr ein Ball gesucht, gefangen und eingelocht. Statt dessen fuhr sein
modifizierter Bot ein Stück geradeaus, drehte sich dann wie wahnsinnig
(manche nannten ihn daher auch "Berserker"), lochte dabei aber
viele Bälle ein und fuhr dann wieder ein Stück weiter ... Battle: Billard Erbauer: Sascha Techn. Ausrüstung: 2 Motore, 2 Taster Fazit: echt fies, aber wirkungsvoll ... (Battles / Bälle versenkt): (5 / 14 --> 2,8 Bälle / Battle) |




 |
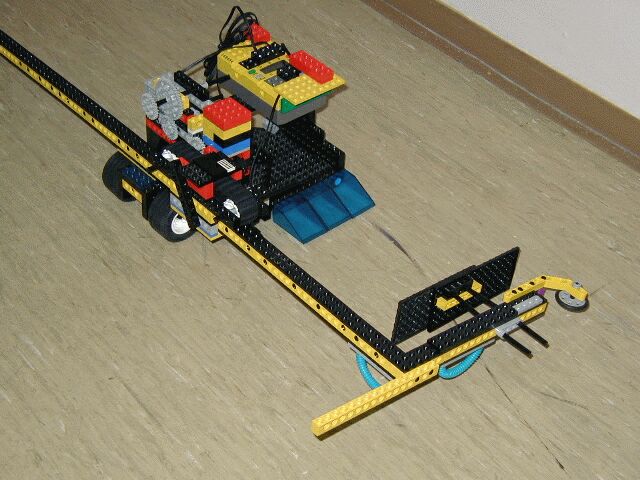
| Fishing
Rod: Christian ist ein altbekannter
Zuseher unserer Battles. Diesmal hat er die Seiten gewechselt und als
Aktiver teilgenommen. Wie nicht anders zu erwarten hat Christian die
Regeln (der Bot muß beim Start auf eine 20 cm Grundfläche passen) extrem
ausgelegt. Sein Fishing Rod sollte so funktionieren: Am Start hat der Bot
wirklich auf eine 20 cm Grundfläche gepaßt. Dann hat er einen ca. einen
Meter langen Ausleger mit angebautem Rechen ausgeworfen. Dann sollte der
Bot samt Rechen zur Bande fahren, den Ausleger mit dem Rechen einfahren
und dadurch ALLE Bälle einfangen. Anschließend wären sie über eine
Rampe durch den Bot direkt in ein Eckloch gerollt. Sollten! Denn der Ausleger hat sich schon in der Testphase jedes mal durch den Aufprall selbst vernichtet und dadurch kam auch Fishing Rod nie zum Einsatz! Es wurden vom Team Christian noch während der Battle massive Umbauten vorgenommen und es kam kurzfristig eine stark verminderte Version zum Einsatz ... Battle: Billard Erbauer: Christian & Co Techn. Ausrüstung: 2 Motore, 1 Taster Fazit: extremes Auslegen der Regeln bringt auch nicht den Sieg ... (Battles / Bälle versenkt): (2 /0 --> 0 Bälle / Battle) |
 |







 |
|
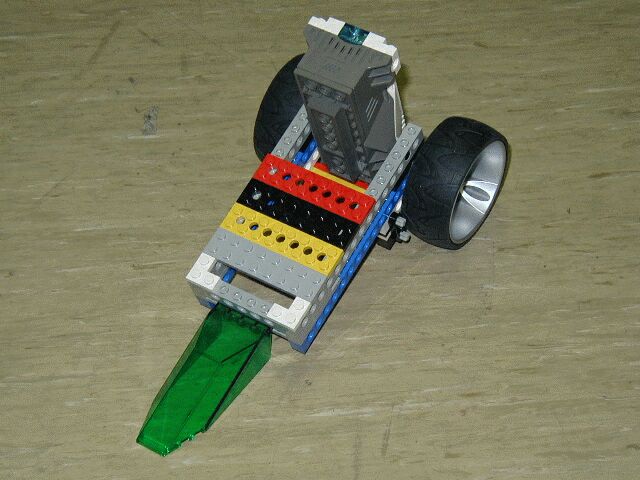
Gynther's
Special: Georg und Gynther haben zwar
gemeinsam gebaut, aber getrennt gekämpft. Diesmal hatte jeder der beiden
einen Bot fertig (!) gebaut zur Battle gebracht. Nur an der Software wurde
noch herumgebastelt. Beide Bots hatten das gleiche Fahrgestell, ein massives Gehäuse, in dem ein lenkbares Antriebsrad steckt. Gynthers Bot hatte zusätzlich an der Frontseite eine Art Raupenantrieb befestigt, der wahrscheinlich die Bälle zu den Löchern bringen sollte. Leider war Gynther's Special nie so weit fertig, um an einer Battle teilnehmen zu können ... Battle: Billard Erbauer: Gynther Techn. Ausrüstung: 3 Motore, 3 Taster Fazit: immerhin war der Bot schon mechanisch fertig, nur weiter so ... (Battles / Bälle versenkt): (0 /0 --> 0 Bälle / Battle) |

 |
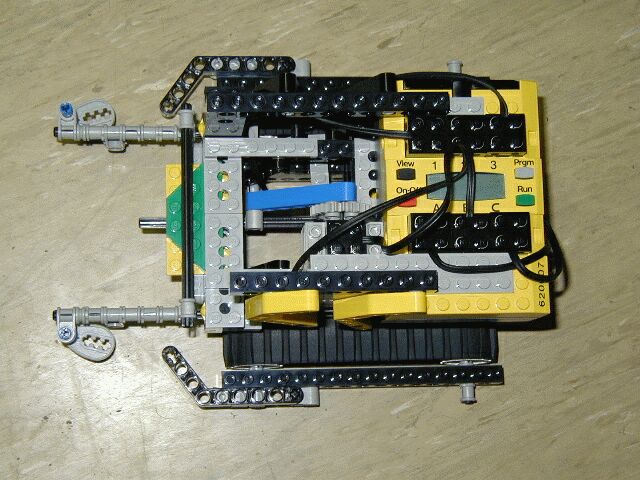
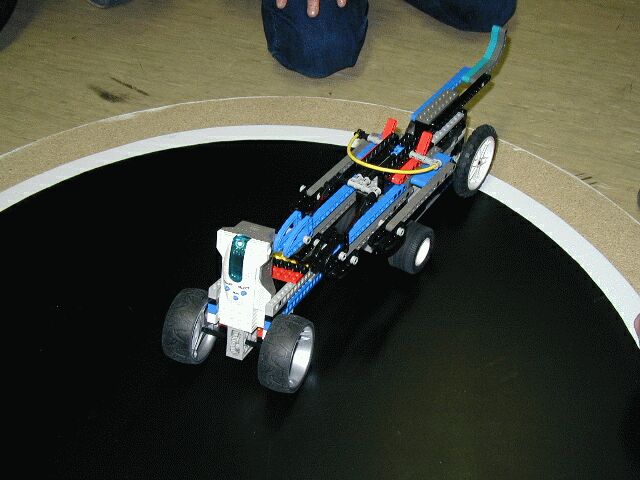
| Mean Machine: Auch
Mike mit seiner Mean Machine hat die Regeln ganz genau ausgereizt. Auch
sein Bot hat beim Start auf eine Grundfläche von 20 cm gepaßt. Beim
Start hat er einen Ausleger zur Seitenbande abgeworfen und ist mit diesem
Ausleger bis zu den Bällen gefahren. Dann hat er einen Schlitten, auf dem
sich ein ausklappbarer Rechen befand, der alle Bälle mitnehmen sollte, mittels Schnur bis zum Seitenloch (2
Punkte!) gezogen. Leider war dieser Schlittenantrieb zu langsam! Dadurch
hatten die gegnerischen Bots jeweils Zeit, Mean Machine so zu stören,
daß es leider keine Punkte gab ... Battle: Billard Erbauer: Mike Technische Ausrüstung: 2 Motore Bewertung: hat im Prinzip sehr gut funktioniert, leider zu langsam ... (Battles / Bälle versenkt): (2/ 0 --> 0 Bälle / Battle) |
 |







 |
 |
Ping: Wie
zu erwarten hat Martin wieder mal Zwillinge vorbeigebracht! Auf seinem Standardfahrwerk hat er ähnlich seiner Gegner einen Käfig zum Sammeln der Kugeln angebracht, diesen aber im Laufe der Battle auch (wie alle anderen) deaktiviert. Trotz seiner sehr breiten Ballfänger hat er mit viel Glück sehr viele Bälle eingelocht und dadurch auch die Battle gewonnen ... Battle: Billard Erbauer: Martin Techn. Ausrüstung: 3 Motor, 1 Lichtsensor, 1 Rotationssensor Fazit: reife Leistung, hat auch die meisten Bälle in einer Battle (10) versenkt ... (Battles / Bälle versenkt): (7 / 27 --> 3,9 Bälle / Battle) |



 |
| Pong: Wie
zu erwarten hat Martin wieder mal Zwillinge vorbeigebracht! Auf seinem Standardfahrwerk hat er ähnlich seiner Gegner einen Käfig zum Sammeln der Kugeln angebracht, diesen aber im Laufe der Battle auch (wie alle anderen) deaktiviert. Trotz seiner sehr breiten Ballfänger hat er mit viel Glück sehr viele Bälle eingelocht und dadurch auch die Battle gewonnen ... Battle: Billard Erbauer: Martin Techn. Ausrüstung: 3 Motor, 1 Lichtsensor, 1 Rotationssensor Fazit: reife Leistung ... (Battles / Bälle versenkt): (5 / 13 --> 2,6 Bälle / Battle) |
|
|
|
 |
Schuss
ins Blaue: Noch ein Neuankömmling!
Peter hat mit seinem Schuss ins Blaue als Einziger so richtig einen
BillardBot gebaut. Sein Bot hatte an der Unterseite eine Ballführung, an
deren Ende sich ein funktionierender Queue befand. Selten, aber doch, hat
sein Bot wirklich einen Stoß am Tisch gemacht. Die Bälle kamen zwar
ungerichtet, aber immerhin kraftvoll unter seinem Bot hervorgeschossen.
Die Mechanik des Queues war allerdings zu langsam, um wirkungsvoll in die
Battle eingreifen zu können ... Battle: Billard Erbauer: Peter Techn. Ausrüstung: 3 Motore, 2 Taster, 1 Batteriekasten Fazit: ein "echter" Billardspieler, aber das Zielwasser fehlte ... (Battles / Bälle versenkt): (4 / 3 --> 0,75 Bälle / Battle) |




  |
| WosWasI: Georg und Gynther haben zwar
gemeinsam gebaut, aber getrennt gekämpft. Diesmal hatte jeder der beiden
einen Bot fertig (!) gebaut zur Battle gebracht. Nur an der Software wurde
noch herumgebastelt. Beide Bots hatten das gleiche Fahrgestell, ein massives Gehäuse, in dem ein lenkbares Antriebsrad steckt. Georg's Bot hatte zusätzlich an der Frontseite eine Art Rührantrieb befestigt, der wahrscheinlich die Bälle zu den Löchern bringen sollte. Battle: Billard Erbauer: Georg Techn. Ausrüstung: 3 Motore, 1 Taster, 2 Rotationssensor Fazit: seltsamer Bot, hat aber als einziger den späteren Gewinner besiegt ... (Battles / Bälle versenkt): (3 / 4 --> 1,3 Bälle / Battle) |
 |




 |
 |
Goliath: Ein
simpler SumoBot, er fuhr ohne Steuerung stur geradeaus. Sein einziger
Pluspunkt war eine vorne befestigte zweckentfremdete Lego Garagenrampe,
welche den Gegner mühelos unterfahren konnte ... Battle: Sumo Erbauer: David Techn. Ausrüstung: 2 Motore Fazit: stur geradeaus ... |

 |
| Jin Sato: Dieser
SumoBot wurde einem Bot von Jin Sato nachempfunden, dessen Beschreibung
ich am Internet gefunden habe. Aus Zeitgründen wurde nur ein Scout mit
seiner internen, simplen Programmierung verwendet. Dadurch war der Bot zu
schnell für eine SumoBattle ... Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 1 Scout, 4 Motore, 2 Taster Fazit: zu schnell, auch der Scout gehört anständig programmiert ... |
 |


 |
 |
Fabian's
Insekt: Basierend auf
einem Microscout wurde dieser Bot für die MiniSumoBattle gebaut. Er hatte
eine große Untersetzung, drei eingebaute Rampen, war langsam, aber sehr
stark ... Battle: MiniSumo Erbauer: Fabian Techn. Ausrüstung: 1 Motor (Microscout) Fazit: der spätere Sieger ... |

 |
| Markus's
Arrow: Basierend auf einem Microscout wurde
dieser Bot für die MiniSumoBattle gebaut. Er hatte tolle Aufbauten, war
aber für eine SumoBattle zu schnell ... Battle: MiniSumo Erbauer: Markus Techn. Ausrüstung: 1 Motor (Microscout) Fazit: eine langsamere Untersetzung wäre besser ... |
 |

 |
|
Mike's
Sledge3: Basierend auf
einem Microscout wurde dieser Bot für die MiniSumoBattle gebaut. Er hatte
eine große Untersetzung, eine eingebaute Rampe, war langsam, aber
gewichtsmäßig falsch austariert ... Battle: MiniSumo Erbauer: Mike Techn. Ausrüstung: 1 Motor (Microscout) Fazit: das Gewicht an der falschen Stelle ... |
 |
 |
Action! (Sumo):
Auf einem kreisrunden Spielfeld von einem Meter Durchmesser ging es gleich zur Sache. Die Grezwerte für die Bots dieser Battle
waren maximal 20 cm Aussenmaße und ein Höchstgewicht von 2,5 kg. Die Gegner
stellten sich in 20 cm Abstand voneinander auf und los ging es ... Hat es ein Bot geschafft, den Anderen innerhalb von 2 Minuten vom Spielfeld zu drängen, war er Sieger (2 Punkte), sonst war es ein Untentschieden (1 Punkt für jeden). Wieder spielten die Bots jeweils gegen jeden der anderen Bots. Leider waren diesmal nur zwei Bots am Start. Während Goliath sich vor lauter Kraft fast nicht von der Stelle bewegte, schoß Jin Sato direkt auf ihn zu. Dabei fuhr er auf die Rampe von Goliath auf, sein Endschalter glaubte dadurch den Spielfeldrand zu erkennen, polte die Motore um und schoß nach hinten. Dort ignorierte er den hinteren Endschalter und schoß aus dem Spielfeld, Battle vorbei! Das Endergebnis unserer dritten SumoBattle war folgendes: 1. Goliath, 2. Jin Sato
|
 |
Action!
(MiniSumo): Auf einem kreisrunden Spielfeld
von 80 Zentimetern Durchmesser ging es gleich zur Sache. Die Grezwerte für die Bots dieser Battle
waren maximal ein Microscout. Die Gegner
stellten sich in 20 cm Abstand voneinander auf und los ging es ... Hat es ein Bot geschafft, den Anderen innerhalb von 2 Minuten vom Spielfeld zu drängen, war er Sieger (2 Punkte), sonst war es ein Untentschieden (1 Punkt für jeden). Hier zeigte es sich auch wie bei der großen SumoBattle, daß eine niedrige Untersetzung wichtig ist. Insekt und Sledge hatten die beste Untersetzung, Sledge aber Probleme mit dem falsch montierten Microscout, er kippte nach hinten. Das Insekt war bei dieser Battle unschlagbar ... Das Endergebnis unserer ersten MiniSumoBattle war folgendes: 1. Fabian's Insekt 2. Mike's Sledge 3. Markus's Arrow
|
| Action!
(Billard):
Mit relativ kurzer Verspätung startete unsere BillardBattle. Auf einem kleinen Billardtisch trafen jeweils zwei Bots aufeinander. In Spielfeldmitte lagen 15 Golfbälle im Dreick angeordnet. Fast alle Bots starteten mit abgeänderten Funktionen, da der Fang-Einloch-Mechanismus bei keinem Bot einwandfreie Ergebnisse brachte. Der beständigste war diesmal Martin mit seinen Ping und Pong-Bots, der unglücklichste wohl Sascha, dessen Fieser Hund in beiden Finali an Martins Raupenantrieb scheiterte. Auch Ballklau lag in der Endwertung überraschenderweise weit vorne ... Das Endergebnis dieser Battle war folgendes: 1. Ping, 2. Fieser Hund, 3. Ballklau |
|
| Fazit:
Wieder eine Battle geschafft und es hat Spass gemacht! Noch nie
hatten wir so viele Bots (16!) bei einer Battle. Billard wird sicher wiederholt, aber beim nächsten Mal werden wir wahrscheinlich wieder Marbles sammeln ... Anbei ein Excel File zur Verwaltung von mehreren Spielern im direkten Vergleichskampf. |
MS Excel97: battle16.xls für max 16 Spieler |
| Danksagung:
Wir danken der Firma LEGO, welche die vorige Robobattle großzügig mit
Preisen gesponsort hat! Hier einige Bilder der glücklichen Gewinner: |
|
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
6.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
6.wiener battle ![]() sensoren
sensoren
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}