roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
5.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
5.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
5. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Info: Spieldetails
DosenSammelBots:
Robot: 2nd TRY
Robot: BLACK
Robot: CanBee 1
Robot: CanBee 2
Robot: DOSENKLAU
Robot: FIX & FERTIG
Robot: WHITE
SumoBots:
Robot: code red
Robot: Green Hornet
Robot: NO IDEA 2
Robot: NO IDEA 3
Robot: SLEDGE 1
Robot: SLEDGE 2
Start der Battle: Action! (Sumo)
Start der Battle: Battle Royal (Sumo)
Start der Battle: Action! (DosenSammler)
Was haben wir daraus gelernt?: Fazit
Archiv: Info zur Robo-Battle
am. 28. 10. 2001
 |
Vormittag: Am
28. 10. 2001 war es wieder soweit! Diesmal trafen sich 5 Teams und
brachten insgesamt 13 BattleBots mit! Das sechste Team musste leider
kurzfristig absagen. Mechanisch waren diesmal die meisten Bots fertig, nur an der Software wurde noch viel geschraubt (nicht wahr, G&G?) ... Wir haben also mit der üblichen 2stündigen Verspätung angefangen ... |





|
| Spieldetails
CanHunt:
In jeder Battle werden zwei Roboter in diagonal gegenüberliegenden Ecken
aufgestellt und zeigen in die Mitte des Spielfeldes. Verteilt am Spielfeld
stehen neun Cola-Dosen. Nun sollen die
Roboter die Dosen sammeln und jeweils einzeln ins eigene Nest bringen. Nach
drei Minuten werden die Roboter gestoppt und die
Anzahl der Dosen gezählt ...
Spieldetails Sumo: In jeder Battle werden zwei Roboter im Abstand von zwanzig Zentimetern gegenüber aufgestellt. Das Ziel ist es, den gegnerischen Roboter vom Spielfeld zu drängen oder bewegungsunfähig zu machen. Nach zwei Minuten werden die Roboter gestoppt und die Punkte verteilt ... |
| 2nd
TRY:
Silvester hat wieder mal tief in die techische Trickkiste gegriffen. Sein
2nd TRY hatte einen aufwendigen Mechanismus, der sowohl die eingesammelte
Dose sicher hinter einer Heb-Schiebetüre verwahrte, als auch den zur
Dosenerkennung montierten Taster verschwenkte. Leider hatte der Bot in den
Ecken immer wieder seine Schwierigkeiten ... Battle: Dosensammeln Erbauer: Silvester Technische Ausrüstung: 3 Motore, 1 Taster, 1 Lichtsensor, 1 Rotationssensor Bewertung: eindrucksvoll konstruiert ... |
 |




|
 |
BLACK:
Martin hat uns wieder mit Zwillingen besucht. BLACK und WHITE waren idente
Bots. Beide hatten jeweils zwei Taster eingebaut um eine eingefangene Dose
zu erkennen und beide hatten ebenfalls zwei Lichtsensoren eingebaut, mit
denen sie das Nest einwandfrei erkennen sollten. Sollten! Leider
funktionierten BLACK und WHITE nicht exakt so, wie sie geplant waren ... Battle: Dosensammeln Erbauer: Martin Technische Ausrüstung: 3 Motore, 2 Taster, 2 Lichtsensor, 1 Rotationssensor Bewertung: Martin hatte sich mehr von seinen Bots erwartet, wir auch ... |




|
| CanBee1: Dieser
Bot war klein und einfach gehalten. Ein im vorderen Fangbereich
angebrachter Taster erkannte einwandfrei eine eingefangene Dose. Diese
wurde von einem herunterklappbaren Bügel so lange festgehalten, bis der
Bot im eigenen Nest war ... Leider waren im fortgeschrittenen Stadium die Batterien schon sehr schwach und CanBee hatte daher seine Schwierigkeiten, sich aus einer Ecke zu befreien! Battle: Dosensammeln Erbauer: Mike Techn. Ausrüstung: 3 Motore, 1 Taster, 1 Lichtsensor, 1 Rotationssensor Fazit: klein, kompakt, nicht so übel ... |
 |




 
 |
|
CanBee2: CanBee2
war ident zu CanBee1 gebaut. Allerdings hatte er noch einen besonderen
Zusatz. Er hatte eine abwerfbare Beleuchtung am Heck montiert. Nach dem
Start sollte er die Beleuchtung im eigenen Nest abwerfen. Nach erfolgtem
Dosenfund sollte CanBee2 sich am Licht orientieren und so leicht ins Nest
finden. In 50 Zentimetern Abstand zum Nest funktionierte das Erkennen der
Beleuchtung ja noch einwandfrei, mit zunehmender Entfernung versgte dieses
Prinzip aber total. CanBee2 wurde noch vor Beginn der Battle auf den
Hardwarestand von CanBee1 zurückgebaut ... Leider hatte er auch die gleichen Batterieprobleme wie sein Zwillingsbruder! Battle: Dosensammeln Erbauer: Mike Techn. Ausrüstung: 3 Motore, 1 Taster, 1 Lichtsensor, 1 Rotationssensor Fazit: klein, kompakt, nicht so übel ... |

|
| DOSENKLAU: Andreas
hat sich die letzte Battle sehr zu Herzen genommen und hat diesmal einen
wesentlich besseren Bot gebaut! Sein DOSENKLAU hatte zwar auch so seine
Probleme mit der Erkennung des eigenen Nestes und mit dem Bügelantrieb
für die Dosenbefestigung, aber irgendwie hat es trotzdem zum Sieg
gereicht! Reife Leistung! Battle: Dosensammeln Erbauer: Andreas Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: späterer Sieger! |
 |



 |
 |
FIX
& FERTIG: Diesmal kamen G&G
sogar mit einen ziemlich fertigen Bot. Mechanisch funktionierte er, die
Software war allerdings noch Baustelle ... Eine eingefangene Dose hat bei diesem Bot einen hoch montierten, als Schalter verwendeten Polwender betätigt. Dieser steuerte den Greifer, der die Dosen festhalten und aufheben sollte. Leider ist das Aufheben der Dosen am zu hohen Gewicht der Dosen gescheitert ... Battle: Dosensammeln Erbauer: Georg und Gynther Techn. Ausrüstung: 3 Motore, 3 Taster, 1 Lichtsensor, 1 Polwender Fazit: leider war FIX & FERTIG doch nicht ganz so fertig ... |



 |
| WHITE: Martin
hat uns wieder mit Zwillingen besucht. BLACK und WHITE waren idente Bots.
Beide hatten jeweils zwei Taster eingebaut um eine eingefangene Dose zu
erkennen und beide hatten ebenfalls zwei Lichtsensoren eingebaut, mit
denen sie das Nest einwandfrei erkennen sollten. Sollten! Leider
funktionierten BLACK und WHITE nicht exakt so, wie sie geplant waren ... Battle: Dosensammeln Erbauer: Martin Technische Ausrüstung: 3 Motore, 2 Taster, 2 Lichtsensor, 1 Rotationssensor Bewertung: Martin hatte sich mehr von seinen Bots erwartet, wir auch ... |
|
|
|
 |
code red: Dieser
Bot war das Flaggschiff meiner SumoBots-Flotte. Er hatte eine starre
Hinterachse, an welcher ein Motor mit hoher Übersetzung und Getriebebox
befestigt war. Um wenig Angriffsfläche zu bieten war code red sehr
niedrig gebaut. Während der Battle wurde er noch aus Gewichtsgründen mit
4 gefüllten Batterieboxen bestückt ... Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 1 Motor, 1 Taster Fazit: einer der beiden Sieger! code red wurde von keinem anderen SumoBot geschlagen, leider zu langsam ... |



 |
| Green
Hornet: Dieser Bot war
mit einer beweglichen Rampe ausgerüstet. Sie sollte sich bei
"Feindkontakt" unter den Bot des Gegners schieben ... Battle: Sumo Erbauer: Mike & Annabel Techn. Ausrüstung: 1 Motor Fazit: stur geradeaus, die Rampe hat zeitweise gut funktioniert ... |
|


 |
|
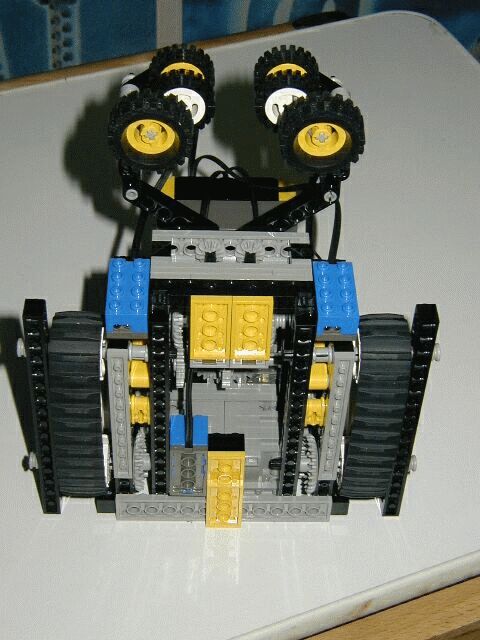
NO IDEA2: Ein
unüblicher Sumo-Bot! Normalerweise geht es direkt auf den Gegner los,
aber dieser Bot hat sofort beim Start eine Rechtskurve gemacht, fuhr dann
ein Stück parallel zum Gegner um ihn dann nach einer Linkskurve von
schräg hinten zu erreichen. Dann versuchte NO IDEA2 mit seiner
Raupe den Gegner zu unterfahren und auszuheben. Das gelang auch bei fast
allen Gegnern ... Battle: Sumo Erbauer: Silvester Techn. Ausrüstung: 2 Motore Fazit: einer der beiden Sieger, er wurde nur von code red besiegt ... |


 |
| NO IDEA3: Ein
kleiner SumoBot, er fuhr ohne Steuerung stur geradeaus ... Battle: Sumo Erbauer: Daniel Techn. Ausrüstung: 1 Motor Fazit: stur geradeaus ... |
 |
 |
 |
SLEDGE1: Nachdem
ich auch über Cybermaster verfüge, hat sich der spezielle Aufbau des
Cybermasters geradezu als SumoBot aufgedrängt! Hinten die beiden
angetriebenen Räder, vorne eine Rampe, fertig ist der SumoBot! Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 2 Motore (Cybermaster) Fazit: ein wenig zusätzliches Gewicht wäre recht gut ... |


 |
| SLEDGE2: Der
baugleiche Zwilling von SLEDGE1. Gleiche Konstruktion, gleiche Probleme
(zu wenig Gewicht!) ... Battle: Sumo Erbauer: Mike Techn. Ausrüstung: 2 Motore (Cybermaster) Fazit: ein wenig zusätzliches Gewicht wäre recht gut ... |
|

|
 |
Action! (Sumo):
Auf einem von Silvester nochmals angefertigtem Spielfeld (Danke,
Sly!) ging es gleich zur Sache. Die Grezwerte für die Bots dieser Battle
waren maximal 20 cm Aussenmasse und ein Höchstgewicht von 2,5 kg. Die Gegner
stellten sich in 20 cm Abstand voneinander auf und los ging es ... Hat es ein Bot geschafft, den Anderen innerhalb von 2 Minuten vom Spielfeld zu drängen, war er Sieger (2 Punkte), sonst war es ein Untentschieden (1 Punkt für jeden). Wieder spielten die Bots jeweils gegen jeden der anderen Bots. Dabei zeigte es sich sehr rasch, dass code red die Kraft am Besten auf das Spielfeld brachte, die Offensivtaktik von NO IDEA2 voll aufging und dass der Cybermaster - SumoBot SLEDGE1 überraschen kraftvoll unterwegs war. Das Endergebnis unserer zweiten SumoBattle war folgendes: 1. ex aequo code red und NO IDEA2, 3. SLEDGE1
|
|
 |
Battle
Royal (Sumo): Nach erfolgreicher
SumoBattle waren die Batterien immer noch nicht leer, also haben wir
gleich alle SumoBotts aufs Spielfeld gestellt. Dann wurden gleichzeitig
alle Bots gestartet. NO IDEA2 hat jetzt seine Strategie geschadet -
er fuhr sofort seine einprogrammierte Kurve und wurde gleich aus dem Feld
gedrängt. Die restlichen vier Bots verkeilten sich bis zum Stillstand. Beim zweiten Start waren nur mehr vier Bots am Start. Jetzt zeigte sich die enorme Kraft von code red - er schob die restlichen drei Bots ohne grosse Schwierigkeiten übers Spielfeld. Leider reichten zwei Minuten nicht ganz aus, um die restlichen Bots über den Spielfeldrand zu drängen. Nachdem code red als einziger Bot noch in Bewegung war wurde er zum Sieger der Battle Royal erklärt ... |
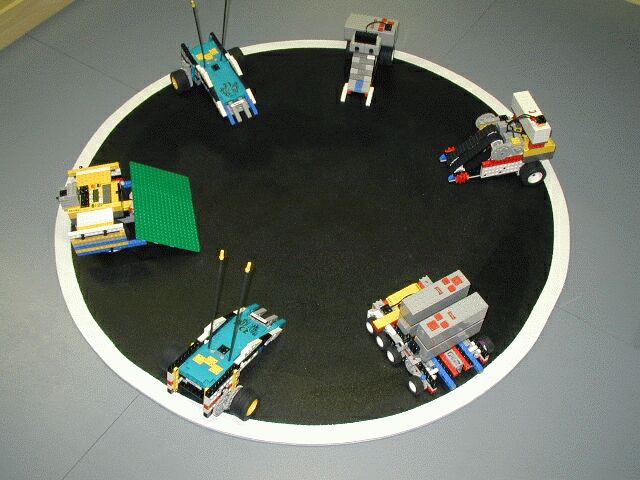
| Action!
(DosenSammler):
Nachdem G&G endlich ihren Bot fertig programmiert hatten, starteten wir blos
mit geringer Verspätung die DosenSammlerBattle. In unserem neuen Spielfeld (2m x 2m mit vier verschiedenfarbigen Ecken, Danke Sly!) trafen jeweils 2 Bots aufeinander. Am Spielfeld gleichmässig verteilt standen neun ColaDosen. Die meisten Bots haben die Dosen einwandfrei gefunden und aufgesammelt. Die grössere Schwierigkeit war wie üblich der Heimweg ins eigene Nest ... Das Endergebnis dieser Battle war folgendes: 1. DOSENKLAU, 2. 2nd TRY, 3. CanBee1 |
|
| Fazit:
Wieder eine Battle geschafft und es hat Spass gemacht! Dosensammeln wird sicher wiederholt, aber beim nächsten Mal werden wir BillardGolf spielen ... Anbei ein Excel File zur Verwaltung von mehreren Spielern im direkten Vergleichskampf. |
MS Excel97: battle8.xls für max 8 Spieler |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
5.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
5.wiener battle ![]() sensoren
sensoren






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}