roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
1.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
1.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
1. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Robot: ANT
Robot: COYOTE
Robot: ROADRUNNER
Robot: RUFFNECK
Robot: UNDER CONSTRUCTION
Start der Battle: Action!
Was haben wir daraus gelernt?: Fazit
Archiv: Info zur Robo-Battle
am. 28.5.2000
Bilder: bereits gebaute "fremde" Marbel-Roboter
 |
Vormittag: Am 28. 5. 2000 war es dann endlich soweit, ab 10:00 versammelten sich die Teilnehmer der 1. Wiener Lego Mindstorms Robo Battle.Bald herrschte kreatives Chaos und eifriges Werken. Trotz guter (???) Vorbereitung der Teilnehmer gab es jede Menge Nacharbeiten am mechanischen Aufbau als auch an der Software. |
     |
 |
Von 10:00 bis 13:00 hatten alle noch Zeit, ihre Konstruktionen zu tunen
und zu verbessern. Noch war die Fernsteuerung erlaubt ... Folgende Roboter haben an der Battle teilgenommen: |
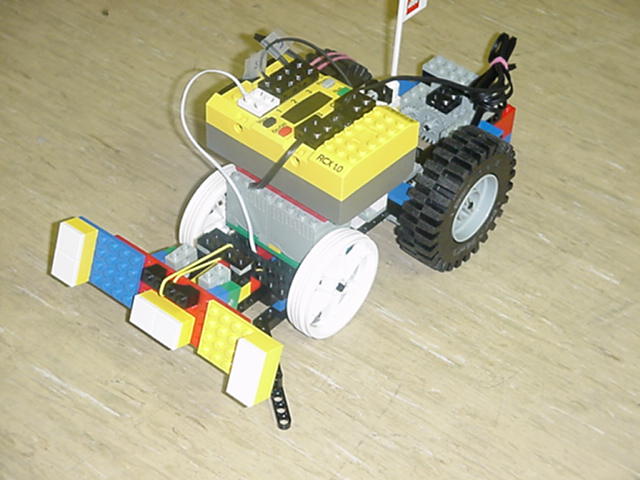
| ANT: Ein auf die Mindstorms
Startpackung basierender Robot mit Finger-Kugelsorter. Ant war der beweglichste aller
Bots, sein Sorter war allerdings fehleranfällig. Sein Lichtsensor war manchmal zu langsam
für den Sorter. Auch der Kugelfangbehälter wurde während der Battle geändert. Technische Ausrüstung: 3 Motore, 2 Taster, 1 Lichtsensor Bewertung: Schnell und robust, Sorter verbesserungswürdig! |
 |
     |
 |
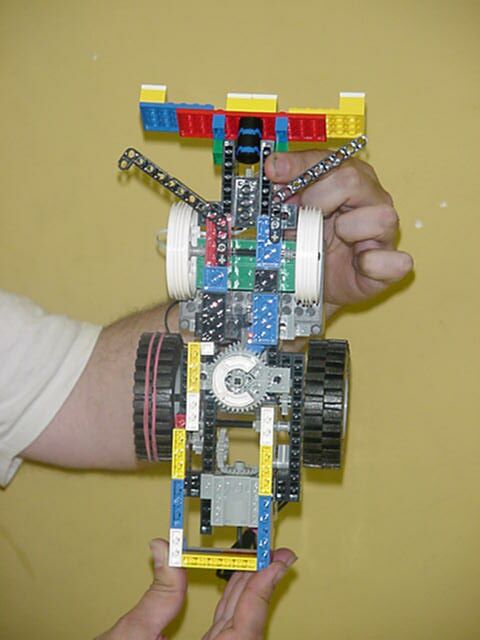
COYOTE: Eine
Verlegenheitslösung, nur als Ersatz für eine Absage, während der Nachtstunden des
Vortages gebaut. Coyote war als Hunter gedacht, deshalb auch nur ein Motor für Antrieb /
Lenkung und ein zweiter Motor für den Sorter. Der dritte Motor sollte einen schweren
Legoblock vor dem gegnerischen Nest abwerfen um den Gegner am Heimkommen zu hindern (kam
aber aus Zeitgründen nicht zur Ausführung). Coyote hatte einen Drehsorter mit
Rotationssensor (... und seine Probleme mit der Software). Technische Ausrüstung: 2 Motore, 1 Taster, 1 Rotationssensor Bewertung: Inovativer Kugelsorter, Antrieb und Software verbesserungswürdig! |
     |
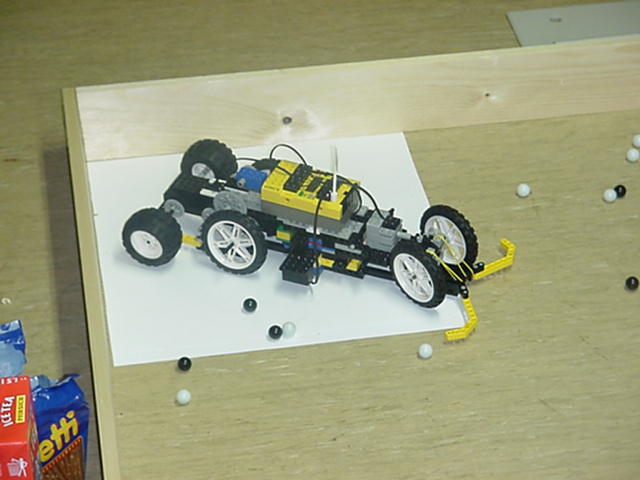
| ROADRUNNER: Ein etwas
seltsam aussehender Robot. Roadrunner hatte einen "Kugelaufzug" bestehend aus
den 3 dünnen großen Reifen in Fahrzeigmitte. Eingefangene Kugeln wurden zwischen die
Reifen geklemmt und hochgehoben (dieser Motor lief dauernd über einen eigenen
Batteriekasten). Dann liefen die Kugeln aus dem Auffangbecken in einen Schiebersorter
(eigener Lichtsensor und Taster) und wurden ausgeworfen oder in den Lagerbehälter
geschoben. Als Antrieb kam der bekannte "Adder/Substractor" zur Ausführung.
Dieser Antrieb läuft wirklich kerzengerade, allerdings frisst dieser Antrieb enorm
Motorleistung (viele Zahnräder, 2 Differentiale und ein Schneckenantrieb) und daher war
Roadrunner sehr langsam und hatte seine Probleme beim Kurvenfahren. Techn. Ausrüstung: 4 Motore, 3 Taster, 2 Lichtsensoren Fazit: Kugelsorter ideal, Antrieb verbesserungswürdig! |
 |
    |
 |
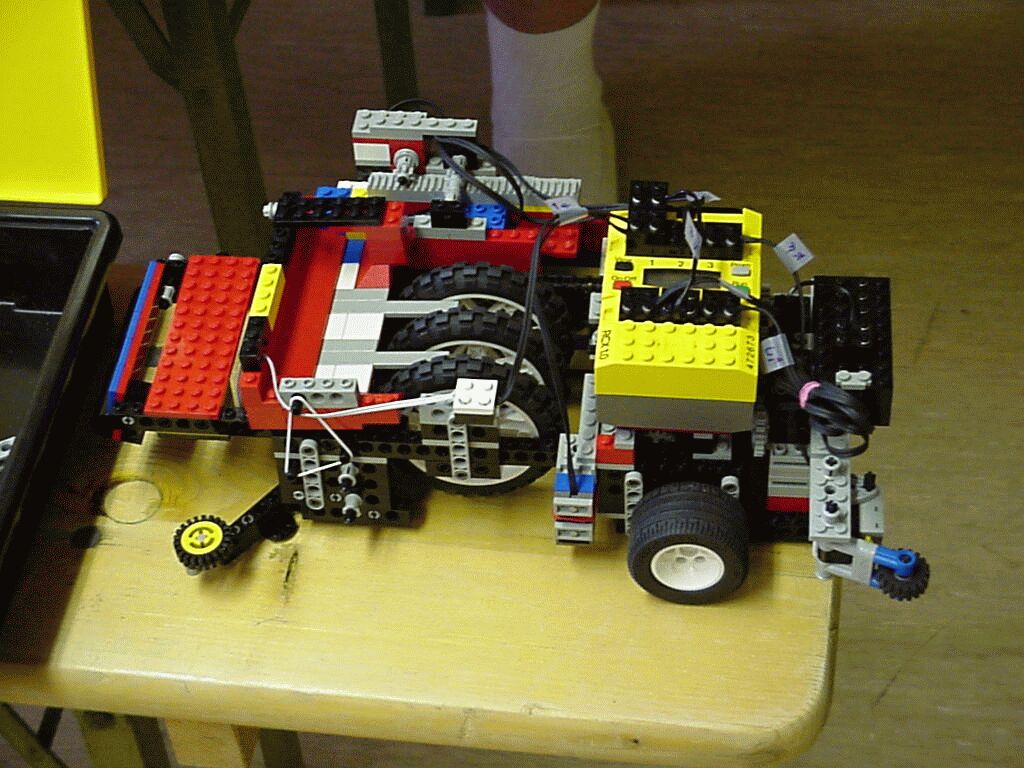
RUFFNECK: Dieser Robot
erinnerte sehr stark an einen PKW. Er war robust und schnell, hatte allerdings seine
Probleme mit den Tastern und mit seinem Rotationssorter. Ruffneck hatte als einziger Robot
eine Vorderradlenkung eingebaut. Bei seiner Sorterbauart wäre ein zweiter Lichtsensor
notwendig gewesen, Ruffneck verzichtete daher auf die Rückkehr ins Nest (aber das haben
alle anderen auch gemacht!) Technische Ausrüstung: 3 Motore, 2 Taster, 1 Lichtsensor Bewertung: Schnell und robust, Sorter verbesserungswürdig! |
   |
| UNDER CONSTRUCTION:
Da gibt es nicht viel zu sagen. Dieser Robot kam halbfertig und kam über dieses Stadium
nicht viel hinaus. Er stand in seinem Nest und bekam seine Punkte nur durch zufällig
vorbeirollende Kugeln oder durch die Minuspunkte der Gegner. Techn. Ausrüstung: 2 Motore, 0 Taster, 0 Lichtsensoren Fazit: alles verbesserungswürdig! Regeländerung gegen inaktive Roboter notwendig! |
 |
 |
 |
Action!: Lange nach dem
geplanten Termin ging es dann doch noch los. Es wurden jeweils zwei Kämpfe ausgetragen,
jeder hatte einmal die schwarzen und einmal die weissen Kugeln. Dauer der Battle jeweils 5
Minuten. Nach 13 Zweikämpfen im Doppel-KO-System standen sich dann ROADRUNNER und RUFFNECK im Finale gegenüber, welches RUFFNECK schließlich für sich entscheiden konnte. Bei der Siegerehrung wurden dann die wertvollen Sachpreise (*g) überreicht. Das Endergebnis war: 1. RUFFNECK, 2. ROADRUNNER, 3. UNDER CONSTRUCTION Allerdings sagt dieses Ergebnis NICHTS über die Qualitäten der einzelnen Roboter aus (sonst wäre UNDER CONSTRUCTION nicht Dritter geworden), vorrangig war diesmal wirklich nur der Spass am Bauen und Kämpfen, das nächste mal (September 2000) werde ich einiges ändern. |
     |
| Fazit: Es hat Spass
gemacht! Allerdings werde ich beim nächsten Mal einiges anders machen: die Punktevergabe, der Eingriff während der Battle von aussen, der Zeitablauf, meinen eigenen Robot besser (und vor allem früher) konstruieren, ... Anbei ein MS Excel File zur Verwaltung von maximal 8 Spielern für das Doppel-KO-System. Es werden automatisch die Ergebnisse berechnet und die Spieler weitergereicht, der Sieger bleibt oben, der Verlierer kommt in die Hoffnungsrunde. |
MS Excel97: battle8.xls für max. 8 Spieler DoppelKoSystem |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
1.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
1.wiener battle ![]() sensoren
sensoren