roboter
![]()
Lego
RCX
Technik
Last Minute
Line Follower
 |
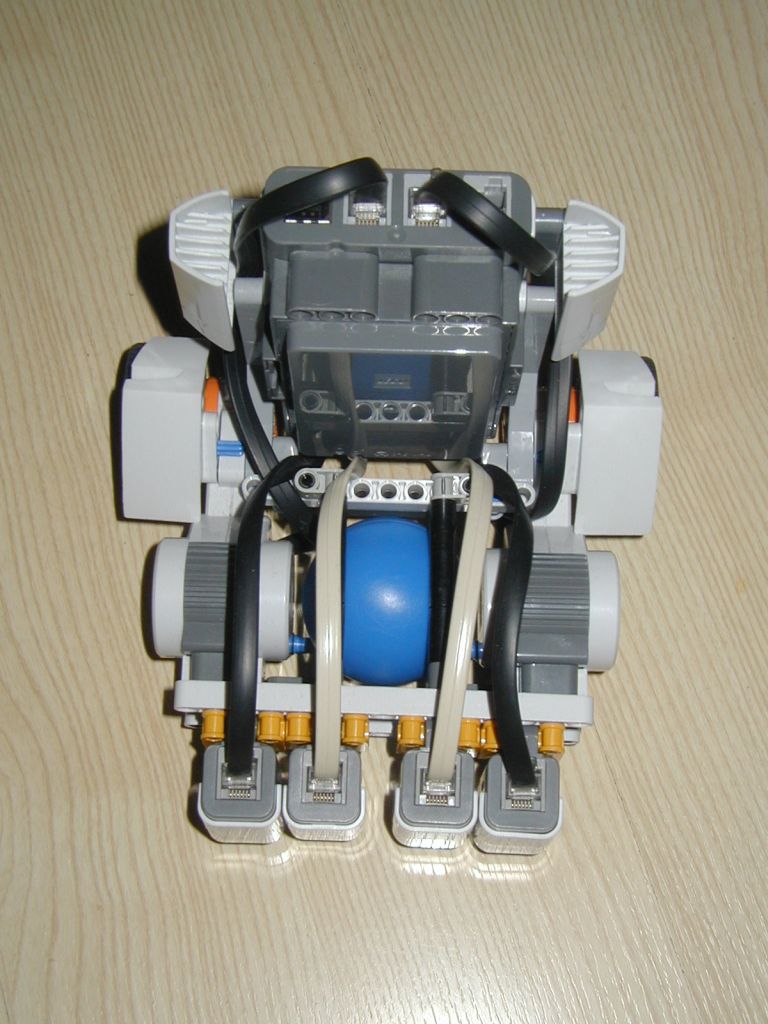
Last
Minute: Dieser Line-Follower-Roboter wurde für die
RobotChallenge 2009 in Wien / Linefollower gebaut. Bei diesem Roboter habe ich wieder eine neue Variante probiert:
Die Hinterräder werden von je einem Motor angetrieben, ein Ball ersetzt
das Stützrad. |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||||||||
|
| Download Files für: ... |
roboter
![]()