service ![]() @mike's page > hobbies > mindstorms > tips&tricks
@mike's page > hobbies > mindstorms > tips&tricks ![]() weltweit lego
weltweit lego
Lego
RCX
Technik
TIPS&TRICKS
Auf dieser Seite will ich versuchen einige Tips & Tricks zu geben.
Banane, oder ... warum fährt mein Bot
nicht geradeaus? ![]()
Bluetooth, oder ... warum spricht mein NXT nicht mit mir?
![]()
Converter-Kabel, oder ... wie stelle ich meine eigenen
NXT-RCX-Kabel
her? ![]()
Geometrie, oder ... wie verbinde ich Technikbalken richtig?
![]()
Kabel, oder ... wie stelle ich meine eigenen NXT-Kabel
her? ![]()
Linearmotor, oder ... wie komme ich ohne Pneumatik aus? ![]()
MotorSharing, oder ... wie verwende ich 1 Motor für 2
Antriebe?
![]()
Musik, oder ... wie bringe ich dem RCX die Noten bei?
![]()
![]() Power Functions, oder ... wie kann
ich meinen NXT fernsteuern?
Power Functions, oder ... wie kann
ich meinen NXT fernsteuern? ![]()
Prüfung!, oder ... wie steuere ich Motore direkt vom
RCX? ![]()
Rotationssensor, oder ... warum nehme ich nicht
billige Standardteile?
![]()
Rotationssensor Teil 2, oder ... warum nehme ich nicht
billige Standardteile?
![]()
StepperMotor, oder ... wie baue ich einen Ersatz?
![]()
Taster, oder ... wie verbinde ich 2 Taster als "UND"-Verknüpfung?
![]()
Fragen oder Wünsche an mike
![]()
Banane, oder ... warum fährt mein Bot nicht geradeaus?
Das kennt man ja, der Roboter fährt nie gerade aus, immer nur
eine Banane.
Was ich dagegen tun kann ...
... folgt!
![]()
Bluetooth, oder ... warum spricht mein NXT nicht mit
mir?
Der Mindstorms NXT kann neben USB auch eine
Bluetooth-Verbindung (BT) aufbauen ...
... und so stellt man sie ein:
Den BT-Dongle (den Bluetooth-Stecker) einfach am PC
anschließen und
Windows erkennt ihn von selbst (zumindest Windows XP).
Nachdem Windows den BT-Dongle erkannt hat sollte in der Taskbar
(im Systemtray, rechts bei der Uhrzeit) ein BT-Symbol stehen.
Start, Ausführen, bthprops.cpl eintippen (und OK clicken) 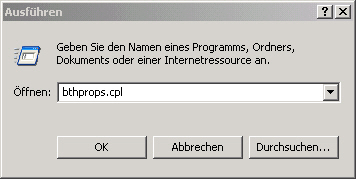
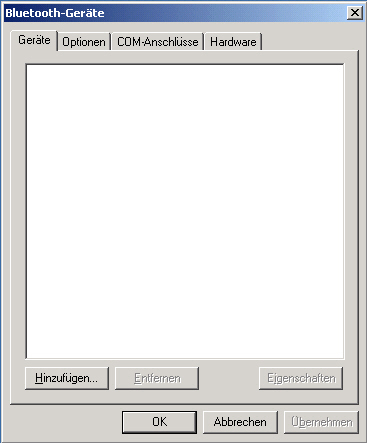 hinzufügen drücken
hinzufügen drücken
NXT einschalten (und im NXT-Menü BT einschalten!) 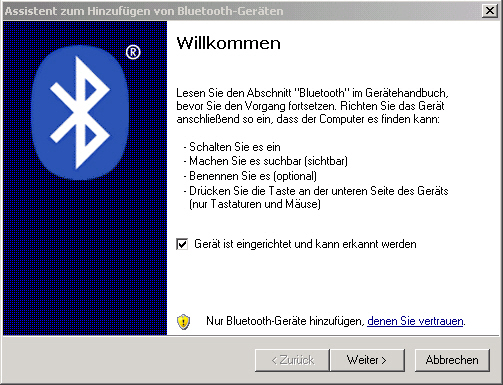
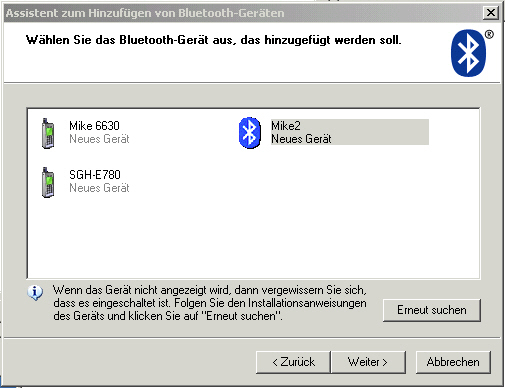
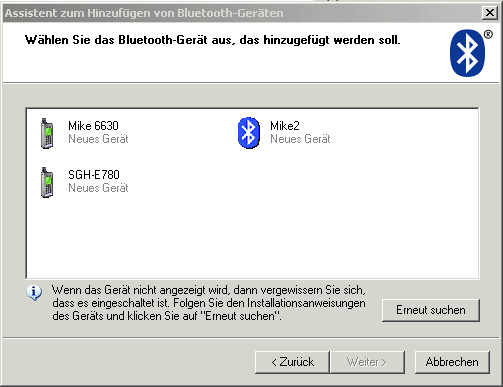 nachdem BT-Geräte erkannt wurden, das Symbol vom NXT-BT anclicken
nachdem BT-Geräte erkannt wurden, das Symbol vom NXT-BT anclicken
 und "Eigenen Hauptschlüssel" wählen
und "Eigenen Hauptschlüssel" wählen 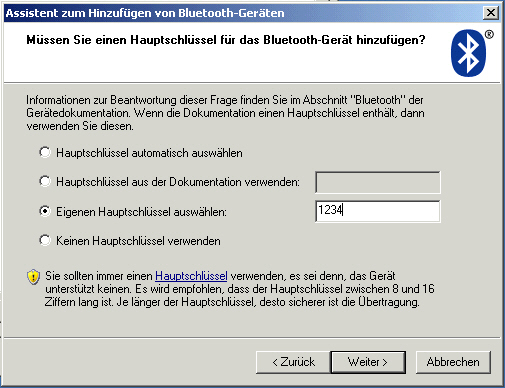 und 1234 eintippen
und 1234 eintippen
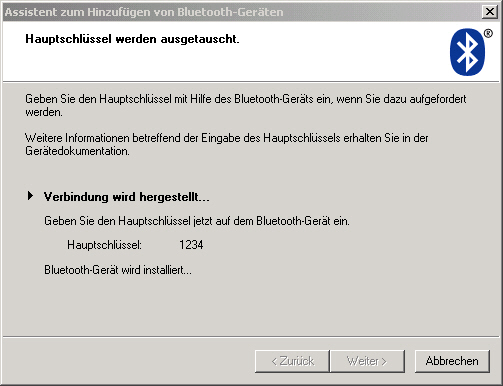 wenn aufgefordert wird, den Schlüssel am NXT eingeben (default 1234)
wenn aufgefordert wird, den Schlüssel am NXT eingeben (default 1234) 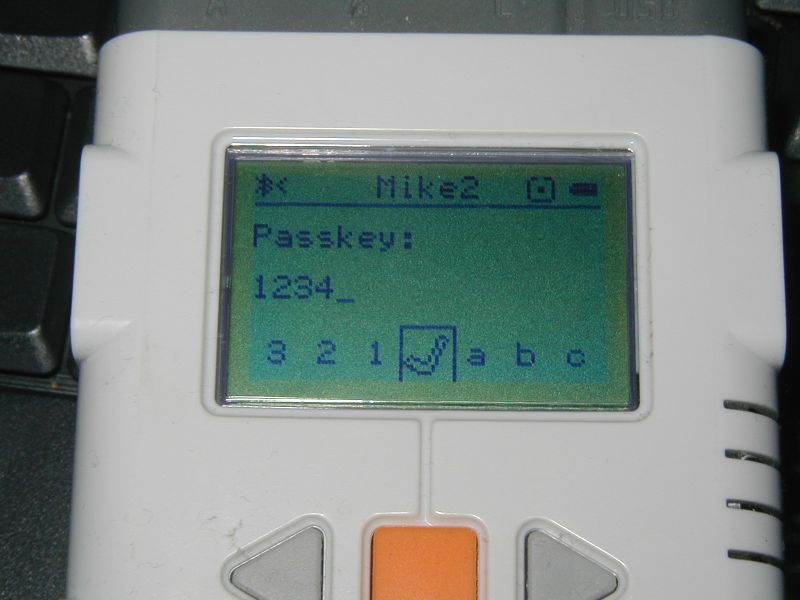
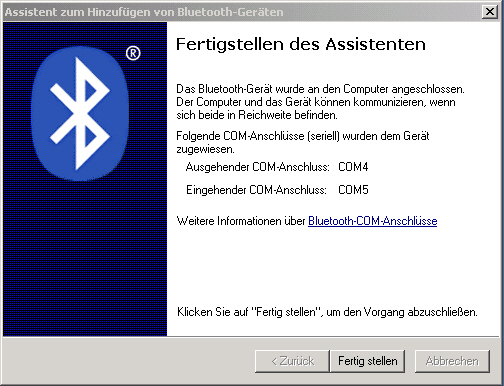 und fertig ist die Bluetooth-Verbindung
und fertig ist die Bluetooth-Verbindung 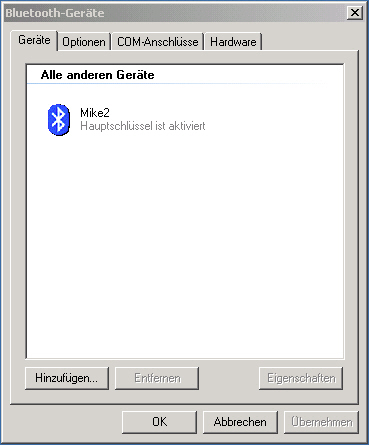
und die Software NXT-G erkennt die Hardware NXT! ![]()
![]()
Converter-Kabel, oder
... wie stelle ich meine eigenen NXT-RCX-Kabel her?
Der neue Mindstorms NXT hat nicht mehr die alten zweipoligen LEGO-Kabel und
Stecker
sondern ein sechspoliges Kabel mit einer Art Telephonstecker (ähnlich RJ12).
Trotzdem kann man aber die alten RCX-Motore und Sensoren verwenden.
Man benötigt dazu allerdings ein ConverterKabel!
Zuerst braucht man die passenden Stecker und eine Telephonstecker-Crimpzange,
weiters noch Telephonkabel und die Hälfte eines 9V-Verbindungskabels.
Allerdings passen die NXT-Stecker nicht genau zu der Zange, da bei den
Telephonsteckern die
Verriegelungsnase mittig und nicht seitlich ist. (Umbauanleitung hier)
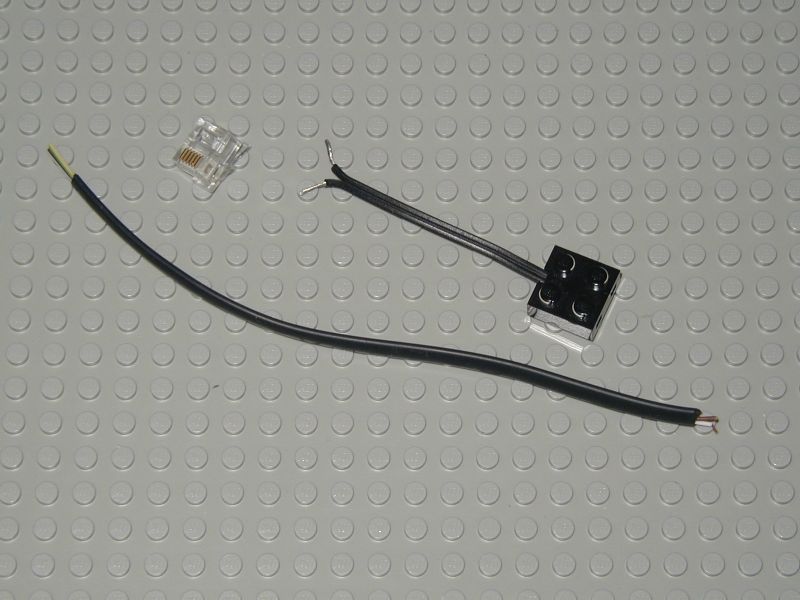

Zuerst lötet man die zwei Pole des 9V-Verbindungskabels an zwei außenliegende
Adern des Telephonkabels.
Anschließend crimpt man den RJ12-Stecker ans Kabel (beide außenliegende
Adern bei der Verriegelungsnase!)


Und fertig ist das Converter-Kabel, um Motore und Sensoren im
"alten" 9V-System (Mindstorms RCX)
verwenden zu können. Entsprechende MyBlocks für NXT-G (Legacy Block Library)
kann man hier
runterladen!


Stecker: Mindsensors (NXT
Compatible (male) Plugs)
Crimpzange RJ12: Conrad (Crimp
Zange orange universal)
oder Crimpzange für MP 6-4 und 6-6: Reichelt (Modular-Crimpzange
für MP 6-4 und 6-6)
Kabel 4pol: Conrad (conrad.at)
Legacy Block Library: LEGO (NXT
Software Updates)
![]()
Geometrie, oder ... wie verbinde ich Technikbalken richtig?
Jeder kennt das. Nicht immer ist ein Bauwerk so stabil wie gewünscht. Aber mit
der richtigen
Verbindung kann man sich sehr gut helfen ...
Hier eine kleine Nachhilfe in Grundlagen:
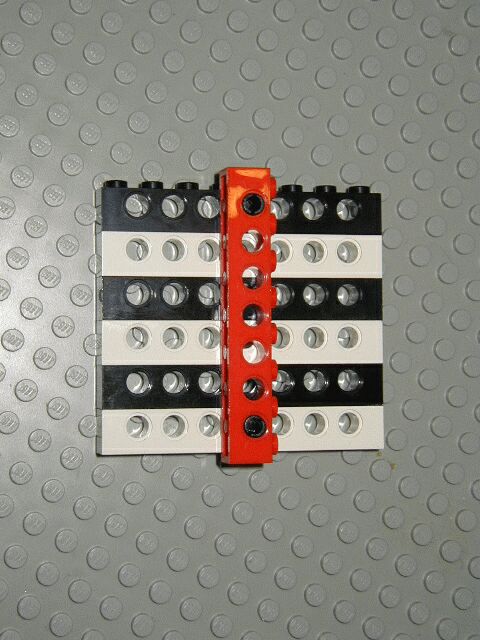
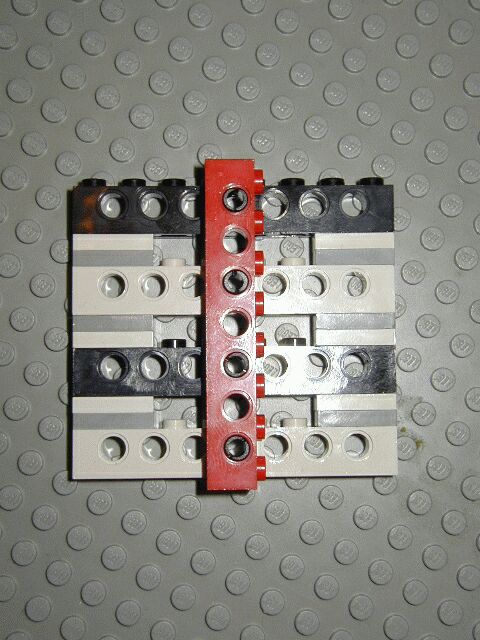
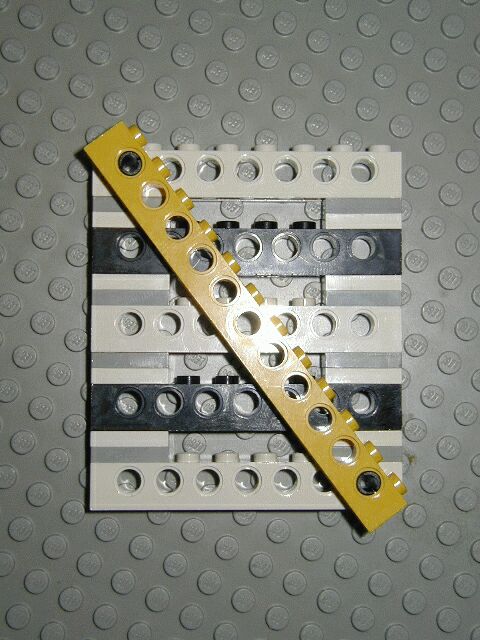
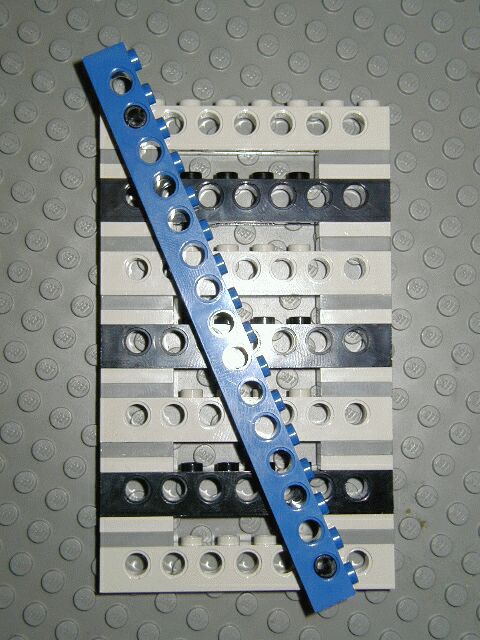
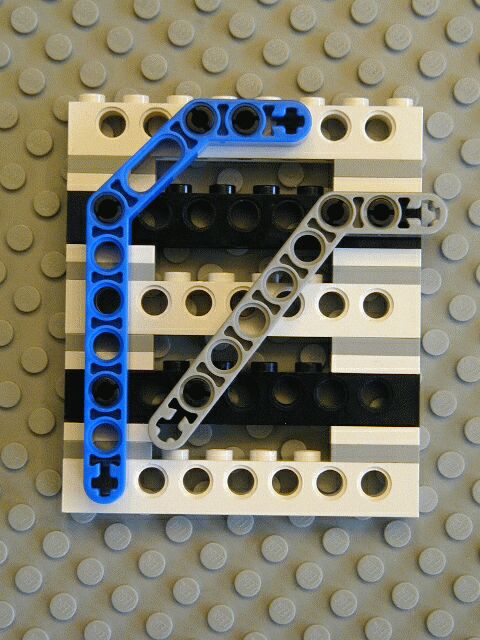
Alles klar?
![]()
Kabel, oder
... wie stelle ich meine eigenen NXT-Kabel her?
Der neue Mindstorms NXT hat nicht mehr die alten zweipoligen LEGO-Kabel und
Stecker
sondern ein sechspoliges Kabel mit einer Art Telephonstecker (ähnlich RJ12).
Was tun wenn ich jetzt eigene Kabel bauen will (länger, weicher oder
Konverterkabel)?
Zuerst braucht man die passenden Stecker und eine Telephonstecker-Crimpzange.


Allerdings passen die NXT-Stecker nicht genau zu der Zange, da bei den
Telephonsteckern die
Verriegelungsnase mittig und nicht seitlich ist. Also her mit Feile und
Bastelmesser und los gehts ...
Rechts oben muß man beim Loch für den sechspoligen Stecker
ein wenig Material wegfeilen, damit die Nase Platz hat (siehe gelber Kreis).


Nachdem der NXT-Stecker einwandfrei in die Zange passt ist das Herstellen
eigener Kabel kein großer Aufwand mehr ...


Stecker: Mindsensors (NXT
Compatible (male) Plugs)
Crimpzange RJ12: Conrad (Crimp
Zange orange universal)
oder Crimpzange für MP 6-4 und 6-6: Reichelt (Modular-Crimpzange
für MP 6-4 und 6-6)
Kabel 6pol: Conrad (conrad.at)
![]()
Linearmotor, oder
... wie komme ich ohne Pneumatik aus?
Pneumatik ist eine feine Sache. Aber nicht immer habe ich alle Pneumatikteile
die ich auch benötige!
Da kann ich mir mit einigen Standardteilen helfen und baue einen Linearmotor
...
Der Linearmotor funktioniet so, daß zwei Scheibchen von einer
Schnecke weiterbewegt werden.
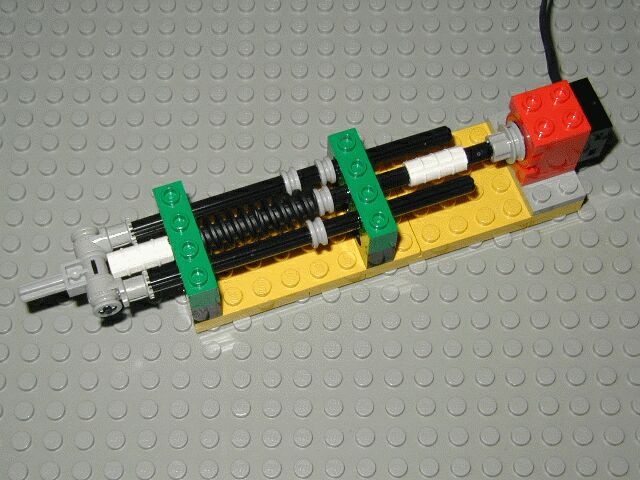
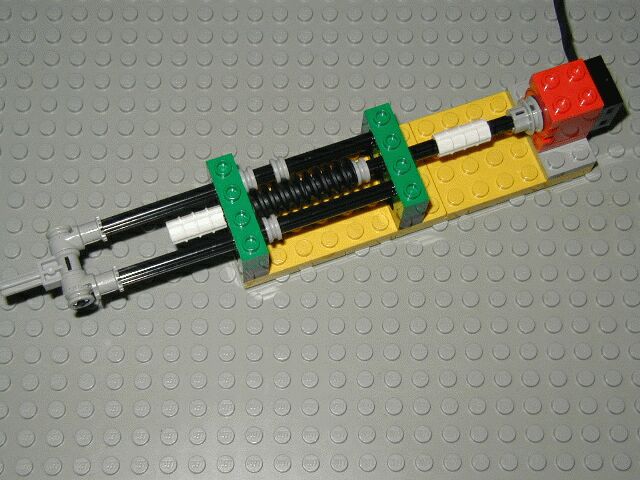
Die Länge des Betätigungsweges hängt nur von der Länge der Schnecke ab
...
![]()
MotorSharing, oder
... wie verwende ich 1 Motor für 2
Antriebe?
Nicht immer hat man genug Motore zur Verfügung. Oder es ist
einfach kein Platz mehr
für einen weiteren Motor. Dann kann man sich einfach helfen ...
Variante 1 (wie schon im Vorlagenheft auf den letzten
Seiten gezeigt):
Man verwendet ein Differential und bringt eine
Ratsche an. Schon kann man
zwei Funktionen erfüllen.
Als Beispiel der Antrieb eines Bots. Wenn sich der Motor vorwärts dreht, drehen
sich beide
Achsen und der Bot fährt geradeaus. Wenn sich der Motor aber in die andere
Richtung dreht, wird
eine Achse abgebremst und der Bot fährt eine Kurve nach hinten ...
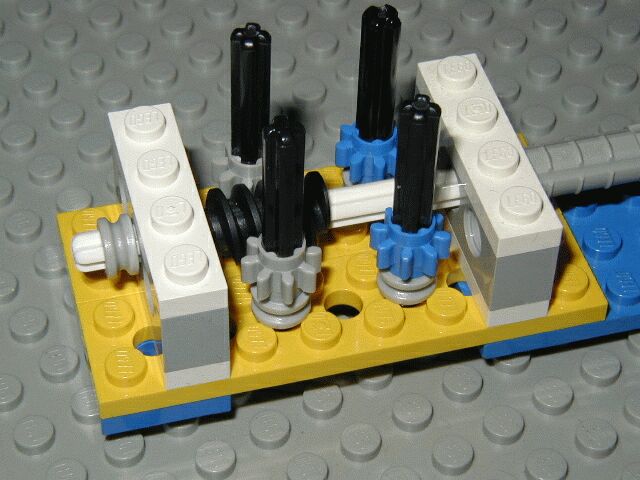
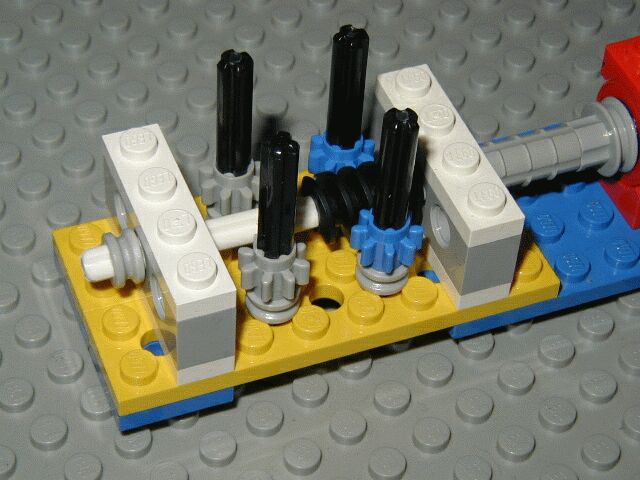
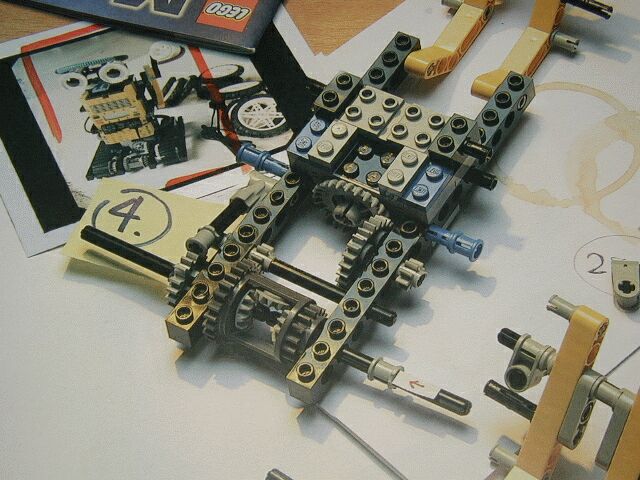
Variante 2 sieht vollkommen anders aus:
Auch hier hat man nur einen Motor und treibt damit zwei verschiedene Sachen
an.
|
|
Wenn sich der Motor im Rechtslauf befindet, treibt die Schnecke die beiden
grauen Zahnräder an. |
|
|
Wenn sich die Drehrichtung ändert verschiebt sich die Schnecke und treibt jetzt die blauen Zahnräder an |
![]()
Power Functions, oder ... wie kann ich meinen NXT fernsteuern?
Der Infrarotempfänger der Power Functions Serie kann auch als
Sensor für den NXT verwendet werden!
Das Einzige was man dafür braucht, ist ein Spezialkabel zur Verbindung des
Empfängers mit einem Sensoreingang. Und außerdem benötigt man natürlich auch
den Infrarotsender!
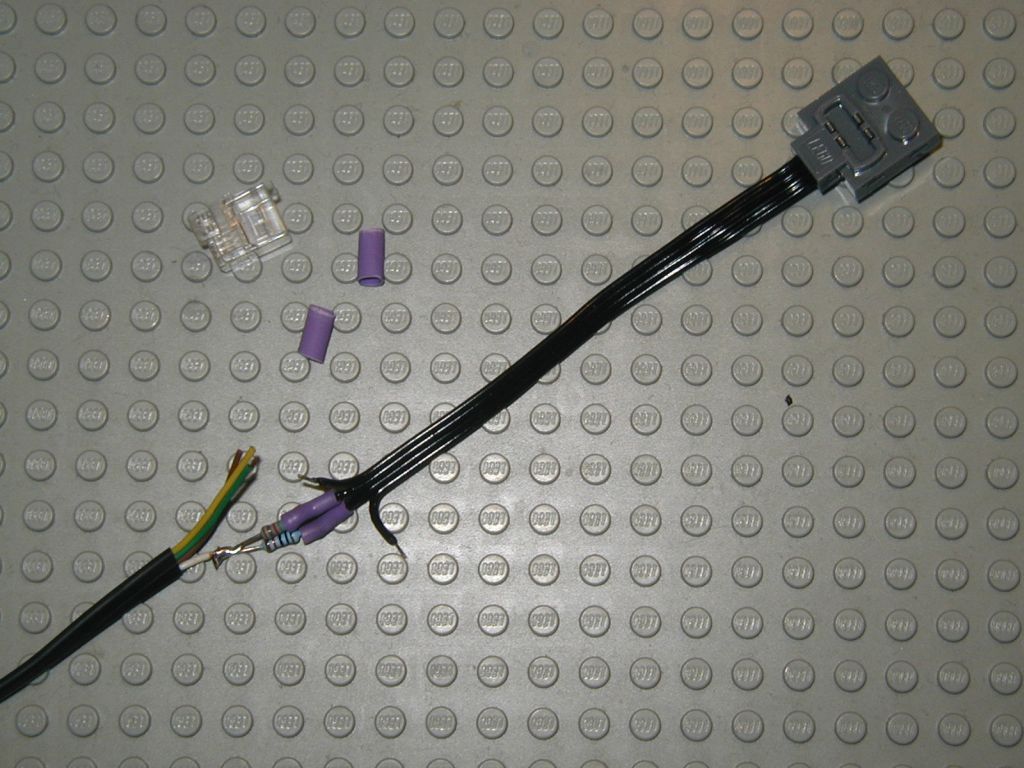
Man braucht den passenden NXT-Stecker und eine Telephonstecker-Crimpzange,
weiters noch zwei Widerstände, Telephonkabel und die Hälfte eines Power
Functions-Verlängerungskabels.
Allerdings passen die NXT-Stecker nicht genau zu der Zange, da bei den
Telephonsteckern die
Verriegelungsnase mittig und nicht seitlich ist. (Umbauanleitung hier)
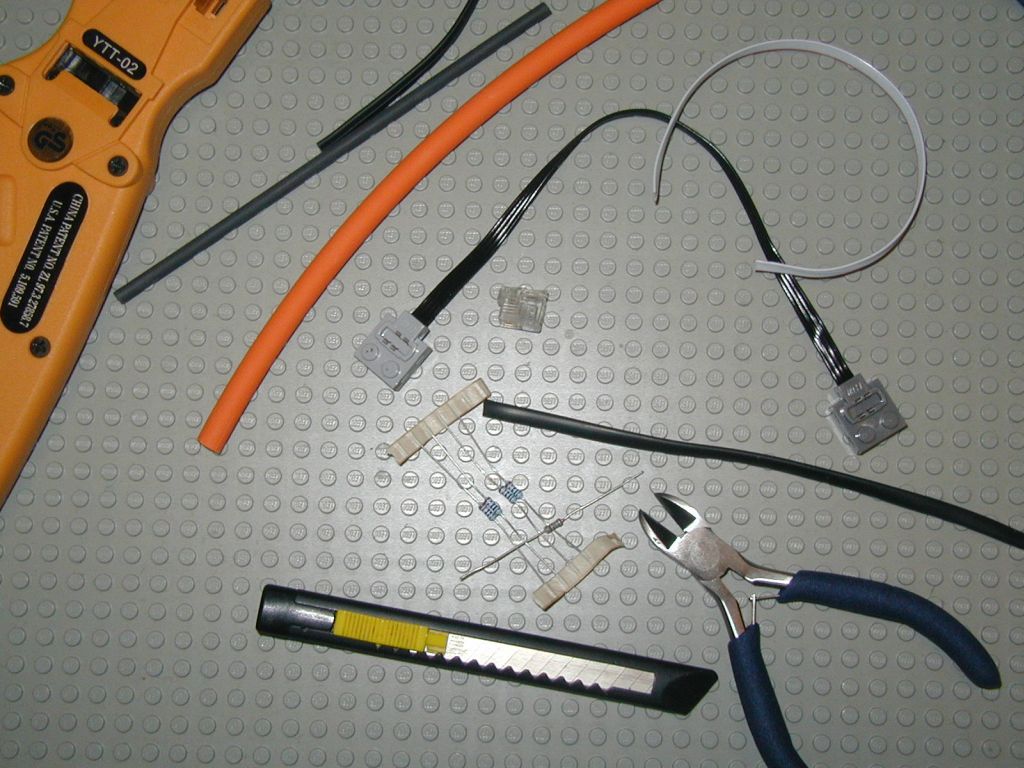
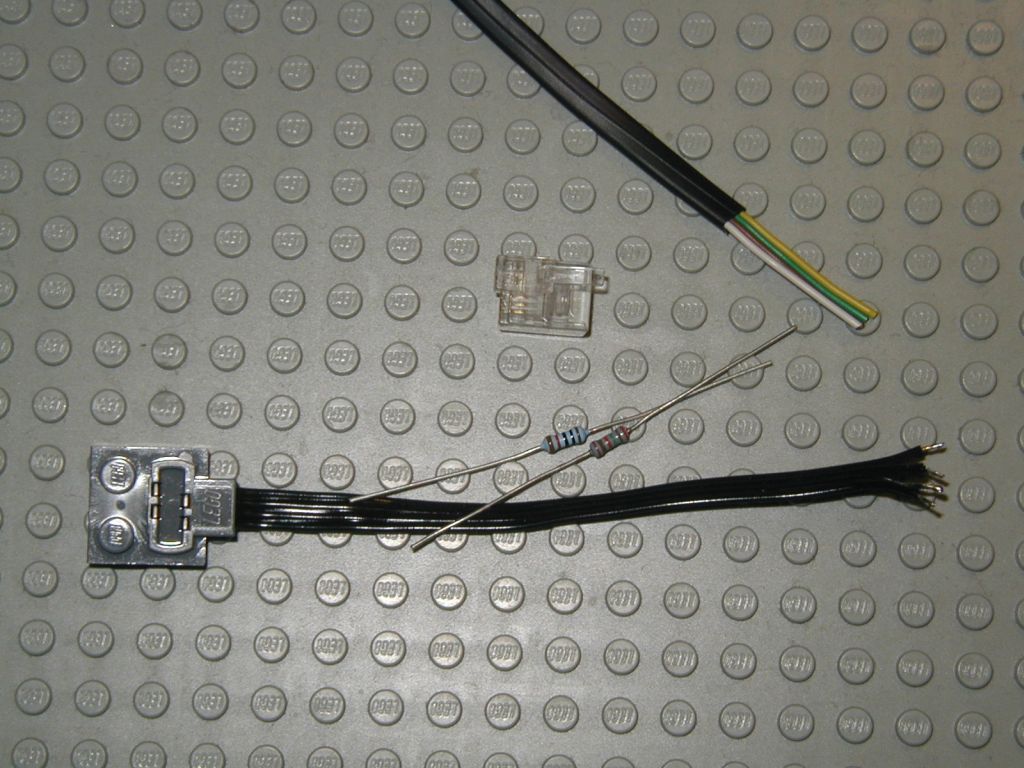
Zuerst schneidet man das Power Functions Verbindungskabel in zwei Hälften.
Wir verwenden den Stecker, der sowohl an der Ober- als auch auf der Unterseite
die Power Functions Kontakte hat.
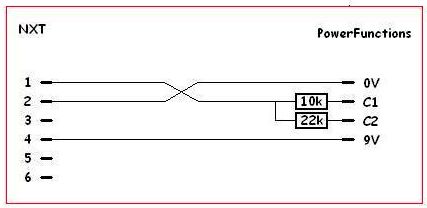
Dann löten wir die Widerstände an C1 und C2 und verbinden sie mit Pin 1 des
NXT.
(Pin 1 ist bei der Verriegelungsnase des NXT-Steckers!)
Durch die zwei unterschiedlichen Widerstandswerte lassen sich dann auch beide
Betätigungen des Hebels
des Power Functions IR-Senders erkennen.
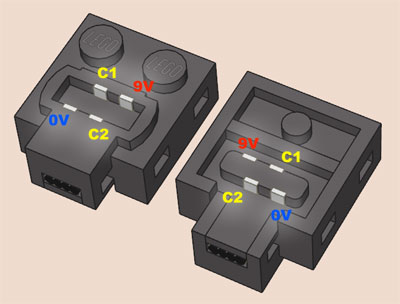
(Bild und Beschreibung des Power Functions Steckers ©Philo (http://philohome.com)
|
Pins NXT |
Adern PF |
|
1 weiss |
10k + C1 |
|
1 weiss |
22k + C2 |
|
2 braun |
0V |
|
4 grün |
9V |
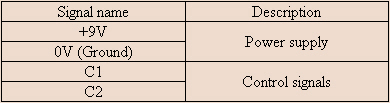
Anschließend verbinden wir die Power Functions Masse (0V) mit
der NXT Masse (Pin 2),
die Power Functions Spannung (9V) mit der NXT Spannungsversorgung (Pin 4)
und isolieren alle Adern mit Schrupfschlauch.


Abschließend crimpt man den RJ12-Stecker ans Kabel, fertig!
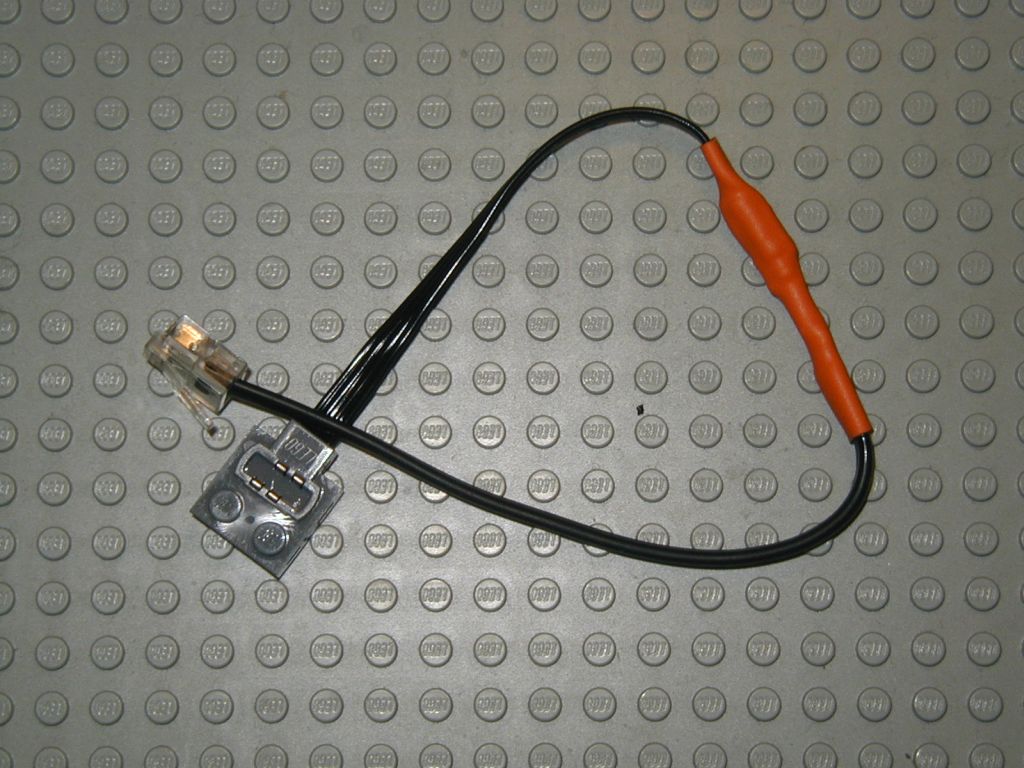

Wenn man mit dem fertigen Kabel den NXT und den Power
Functions Empfänger verbindet
kann man durch Ermittelung des RAW-Wertes eines Lichtsensors den Zustand
erkennen
(Hebel auf der Power Functions Fernsteuerung nach vorne gedrückt, in der Mitte,
nach hinten gedrückt).
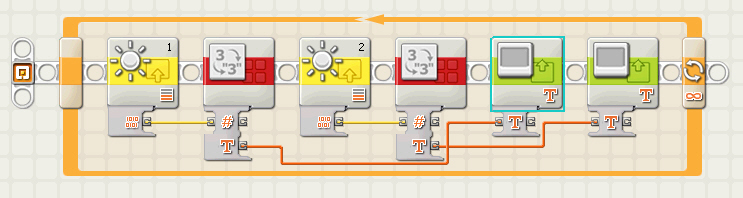
Programm zum Downloaden hier: ![]()
Stecker: Mindsensors (NXT
Compatible (male) Plugs)
Crimpzange RJ12: Conrad (Crimp
Zange orange universal)
oder Crimpzange für MP 6-4 und 6-6: Reichelt (Modular-Crimpzange
für MP 6-4 und 6-6)
Kabel 4pol oder 6pol: Conrad (conrad.at)
Power Functions Verlängerungskabel (LEGO)
![]()
Musik, oder ... wie bringe ich dem RCX die Noten bei?
Der Bot erledigt alle Aufgaben zur Zufriedenheit, da ist eine Melodie fällig ...
 |
Im RCX Controll Center (RCX CC) kann man unter
"Tools / RCX Piano" direkt auf die Tasten drücken und ein Lied
spielen. Als Ergebnis bekommt man z.B. diesen NQC-Code --> #define __NOTETIME 10 #define __WAITTIME 12 PlayTone(330,4*__NOTETIME); Wait(4*__WAITTIME); Wait(4*__WAITTIME); PlayTone(175,4*__NOTETIME); Wait(4*__WAITTIME); PlayTone(330,1*__NOTETIME); Wait(1*__WAITTIME); |
![]()
Prüfung!, oder
... wie steuere ich Motore direkt vom RCX?
Der Bot fertig gebaut, aber noch kein Programm geschrieben.
Wie teste ich jetzt einen Motor ...
| Variante 1: Lego hat sich dazu was überlegt (sagt es
aber leider keinem!): Unser Bot ist fertig, der Motor hängt an Ausgang A vom RCX. Den RCX einschalten, die Taste "View" so oft drücken (4x für Ausgang A), daß der große Pfeil auf Ausgang A zeigt, und die View-Taste gedrückt halten. Jetzt kann man durch Drücken auf die Tasten "Run" bzw. "Prgm" den Motor nach links bzw. nach rechts laufen lassen. Ebenso bei Ausgang B (5x drücken) und Ausgang C (6x drücken) möglich. |
 |
|
Variante 2 bietet das RCX Controll Center (RCX CC): Bei dieser wirklich gelungenen Oberfläche zur Programmiersprache NQC gibt es unter "Tools / Direct Control" bzw. "Tools / RCX Joystick" die Möglichkeit, alle Motore des RCX über den InfrarotTower mit verschiedenen Geschwindigkeiten anzusteuern. |
|
![]()
Rotationssensor, oder ...
warum nehme ich nicht
billige Standardteile?
Der Rotationssensor ist eine feine Sache. Leider einzeln etwas teuer (wenn man
ihn bekommt),
aber auch teuer im "Ultimate Accessory Set" zusammen mit der
Fernsteuerung ...
Aber es geht auch ohne den original Rotationssensor!
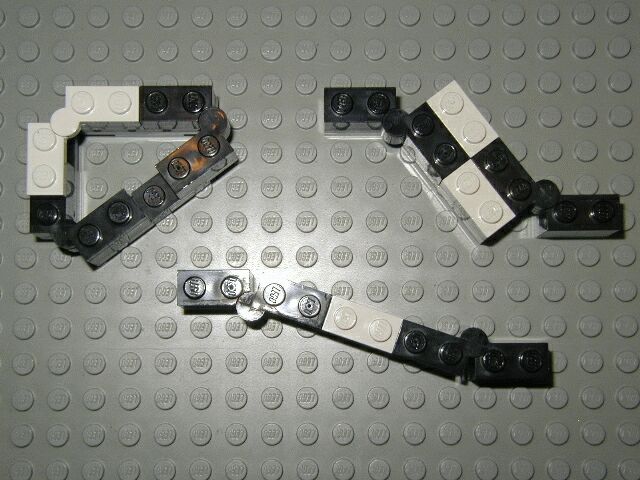
Man kann sehr gut den billigen Polwendeschalter (Polarity Switch) verwenden.
Er funktioniert (wie vorgesehen) folgendermaßen: Auf der einen Seite wird
die Batterie angeschlossen
und auf der anderen Seite der Motor. Je nach Stellung des Polwendeschalters
bewegt sich der Motor
links - gar nicht - rechts.
Schließt man den Polwendeschalter allerdings auf der einen Seite kurz (mit
einem kurzen Kabel), dann
gibt er auf der anderen Seite bei jeder Umdrehung vier Impulse ab.
(Genauer gesagt: In NQC misst man mit dem Befehl "SENSOR_MODE_PULSE"
vier Impulse,
mit dem Befehl "SENSOR_MODE_EDGE" sogar acht Impulse!)
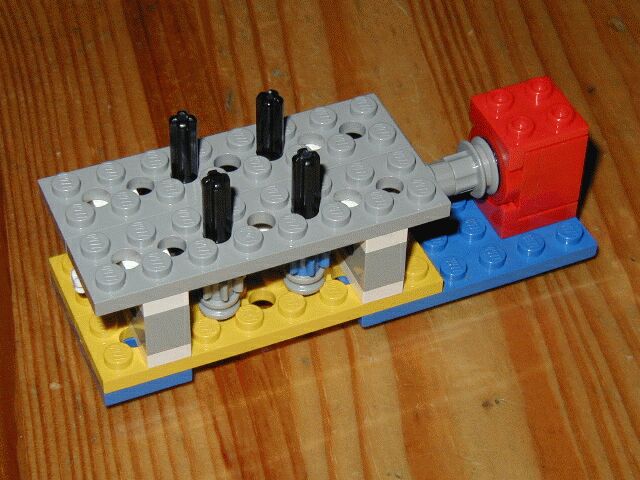
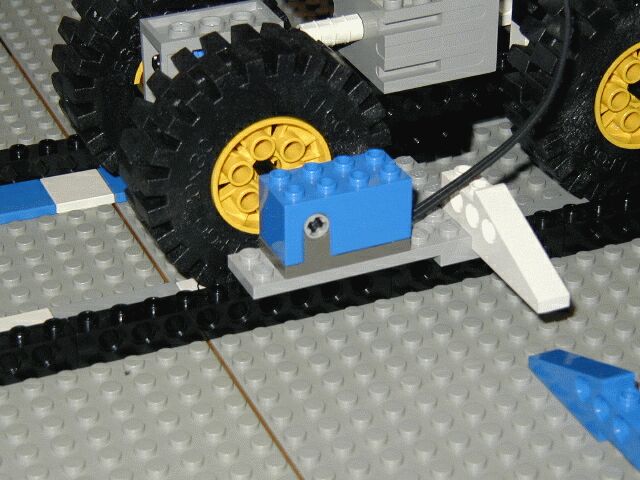
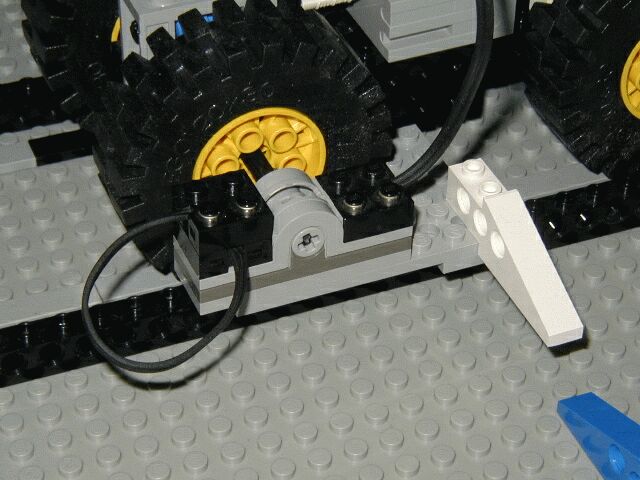
Mit folgendem Versuchsaufbau habe ich sowohl den original
Rotationssensor als auch
den Polwendeschalter getestet:

Die Aufgabenstellung war: 15 Sekunden vorwärts fahren (ca. 1 m) und dabei
die Impulse des jeweiligen
Rotationssensors mitzählen. Anschließend rückwärts fahren und bei
Zählerstand "0" stoppen.
Die Abweichung vom Startpunkt wurde gemessen.
Der original Rotationssensor
kam auf folgende Werte: (NQC-Programm hier downloaden)
|
Versuch |
Abweichung |
|
1 |
-5 mm |
|
2 |
0 mm |
|
3 |
-5 mm |
|
4 |
+10 mm |
Der Polwendeschalter
kam auf folgende Werte: (NQC-Programm hier downloaden)
|
Versuch |
Abweichung |
|
1 |
0 mm |
|
2 |
0 mm |
|
3 |
0 mm |
|
4 |
-5 mm |
Wie man sieht ist der Polwendeschalter ohne weiteres zu
verwenden.
Vor- und Nachteile:
Der original Rotationssensor: genauer (wenn man ihn mit höherer Drehzahl
betreibt),
teurer, ist aber schnell genug um auch
direkt an der Motorachse betrieben zu werden.
Der Polwendeschalter: billig, erfordert mehr Motorkraft, funktioniert
aber einwandfrei.
Achtung: Aufpassen beim Kurzschließen des Polwendeschalters
mit einem kurzen Kabel!
Richtige Anordnung -->  , falsche Anordnung -->
, falsche Anordnung --> 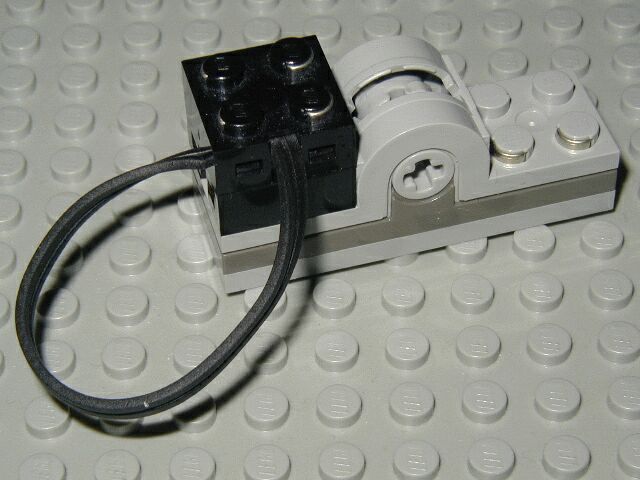
![]()
Rotationssensor Teil 2, oder ...
warum nehme ich nicht
billige Standardteile?
Wenn man nicht wirklich einen Rotationssensor braucht, weil man eigentlich nur
einige Impulse zählen will,
dann kann man auch sehr gut den LEGO Speedcomputer verwenden, wenn man ihn
umbaut.

Man kann den Speedcomputer zerlegen, wenn einen das Innenleben interessiert ...
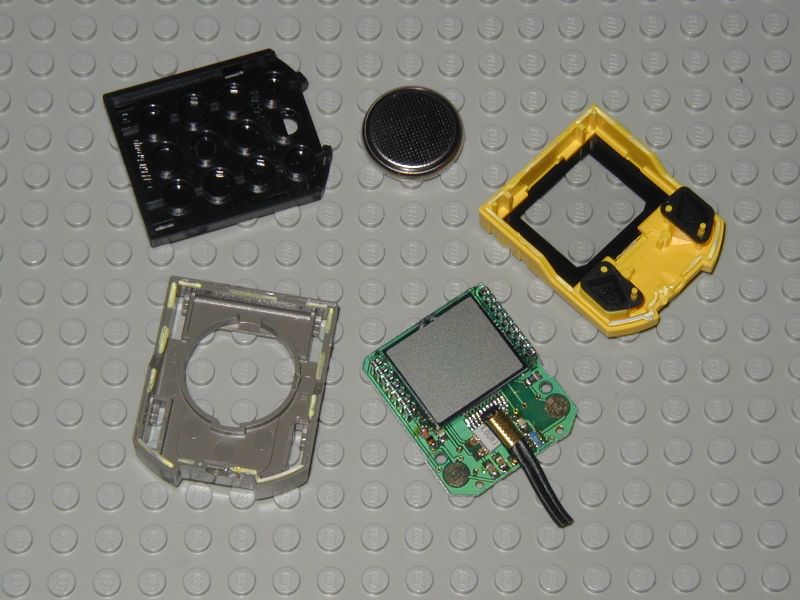
... aber eigentlich benötigt man nur den Impulsgeber und die Hälfte eines
Verbindungskabels.

Einfach beide Enden zusammenlöten und schon hat man einen Ersatz für den
Rotationssensor!

Dieser Sensor liefert drei (3) Impulse pro Umdrehung. Einfach nur Impulse, kein
richtungsabhängiges
Addieren oder Substrahieren wie der Rotationssensor.
![]()
StepperMotor, oder ... wie baue ich einen Ersatz?
Schrittmotore sind in der Industrie übeall zu finden. Mit ihnen schafft man
eine hohe Wiederholgenauigkeit.
Hier der Nachbau aus Standardteilen ...
... folgt!
![]()
Taster, oder ... wie verbinde ich 2 Taster als "UND"-Verknüpfung?
Die Anzahl der Tastereingänge beim RCX sind begrenzt. Leider!
Aber mit der richtigen Verkabelung hat man mehr Möglichkeiten ...
... folgt!
![]()
service ![]() @mike's page > hobbies > mindstorms > tips&tricks
@mike's page > hobbies > mindstorms > tips&tricks ![]() weltweit lego
weltweit lego