roboter ![]()
Lego
RCX
Technik
EiPlotter
 |
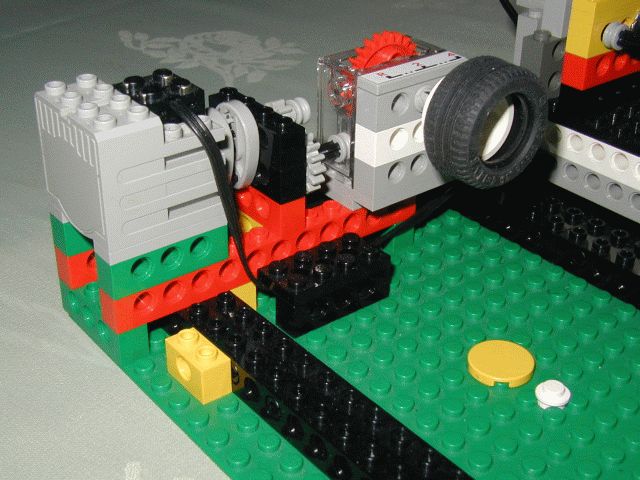
EiPlotter: Diesmal habe ich mir die Arbeit des Ostereierfärbens leicht gemacht und habe es meinen Roboter erledigen lassen! Der Bot ist so ausgelegt, daß er mit den Standardbausteinen des RIS-Baukastens (mit einem zusätzlichen Motor) gebaut werden kann. Um nicht unnötig viele Taster oder Rotationssensoren verwenden zu müssen wurde der Motorantrieb mittels Schrittmotoren gelöst (100%ig aus LEGO Bauteilen hergestellt!). Das Ei wird in 48 Steps gedreht, der Schlittenweg des Stiftes ist 16 Steps lang (hier ist nur die Länge der Technikachsen die Grenze). Die Bemalung des Eis erfolgte durch Filzstifte, eine mehrfarbige Beschriftung war vorgesehen, der Bot hat zum Stiftwechsel aufgefordert. Mit ca. 40 bemalten Eiern hat dieser Roboter die ihm gestellten Aufgaben zu meiner vollen Zufriedenheit erledigt! Schrittmotor: Der Motor treibt direkt eine "Kurbelwelle" an, welche durch einen Gummiring in der unteren Stellung gehalten wird. Jetzt dreht der Motor mindestens 185 Grad und floatet dann (nicht OFF, sonst würde der Motor bremsen). Der Gummiring vollendet die Drehung auf 360 Grad. Damit kann man mit einer reinen Softwarelösung ohne weitere Taster oder Rotationssensoren eine volle Umdrehung machen, und das (mit Wartepausen für den Gummi) immer wieder ... |
| von mir gebaut | X | X | X | |||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||
|
|
| Download Files für:
|
roboter ![]()