roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
3.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
3.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
3. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Robot: ALPHA
Robot: BETA
Robot: BUGG-Y
Robot: BUGG-Z
Robot: HARVESTER
Robot: NOBODY
Robot: ROADRUNNER II
Robot: ROTER OKTOBER
Robot: SKORPIO
Start der Battle: Action!
Was haben wir daraus gelernt?: Fazit
Archiv: Info zur Robo-Battle
am. 4.3.2001
 |
Vormittag: Am
4. 3. 2001 war es wieder soweit! Kurz nach 10:00 waren wir alle
versammelt, 6 Teams mit insgesamt 9 BattleBots! Und diesmal gab es keine
einzige Absage! Kompliment! Allerdings waren nicht alle Bots so wirklich fertig, man könnte fast sagen einige kamen nur in Einzelteilen daher, aber wir wollen mal nicht so kleinlich sein ... Daß allerdings auch die Programme nicht fertig waren, hat den Start der Battle dann fast um drei Stunden verzögert, aber was soll's! |





|
| ALPHA:
Martin war erstmalig bei uns und brachte einen wirklich neuartigen Bot
mit! ALPHA hatte eine normale rechts-links Steuerung mit Gummiraupen, allerdings keinen einzigen Taster als Sensor angebaut. Die Erkennung eines Hindernisses wurde durch einen Rotationssensor, der an einer der angetriebenen Achsen montiert war, realisiert. Hat sich die Achse nicht mehr gedreht war der Bot wohl bei einem Hindernis ... Auch der "Sorter" war bei ALPHA ganz anders: Vor dem Kugelbehälter waren zwei Lichtsensoren montiert. Wenn sie eine richtige Kugel erkannten, hoben sie die Klappe und der Bot sammelte die Kugel ein, Klappe zu, fertig. Bei einer falschen Kugel blieb die Klappe zu und der Bot schwenkte weg. Erkannten die Lichtsensoren allerdings das eigene Nest ging die Klappe auf, der Bot fuhr zurück und deponierte die gesammelten Kugeln im Nest, doppelte Punkte! Technische Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Bewertung: Inovativer Kugelsorter und intelligenter "Sensor", späterer Sieger! |
 |





|
|
BETA:
Der Zwillingsbruder von ALPHA. Baugleich, gleiche Funktionen, schwächere Batterien. Leider kam es nie zu einem direkten Aufeinadertreffen beider Bots, wäre interessant gewesen ... Dieser Bot fuhr eigentlich für Steve62, unserem Host des deutschprachigen Forums (http://mindstorms.com), der leider nicht anwesend sein konnte! Technische Ausrüstung: 3 Motore, 2 Lichtsensor, 1 Rotationssensor Bewertung: Inovativer Kugelsorter und intelligenter "Sensor" |
|
|
| BUGG-Y: Ein
kleiner, kompakter Bot mit links-rechts Steuerung. Anders als Alpha hatte
er einen normalen Schiebe-Kugelsorter. Sein Problem war eigentlich sein
gutes Programm. Er fuhr recht schöne 90 Grad Kurven und damit
regelmäßig um alle Kugeln herum ... Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: klein, kompakt, nicht so übel ... |
 |




 |
|
BUGG-Z: Der
Zwillingsbruder von BUGG-Y. Baugleich, gleiche Funktionen ... Allerdings hatte sein Programm manchmal einen Bug (oder einen BUGG?) und sammelte ausgerechnet die falschen Kugeln, na ja! Auch hier kam es leider nie zu einem direkten Zusammentreffen der Brüder. Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: klein, kompakt, nicht so übel ... |
|
|
| HARVESTER: Ein
Mähdrescher als KugelBot! Georg hatte mit HARVESTER Gynthers Ideen der letzten Robobattle in die Tat umgesetzt. Allerdings war er mechanisch auch nicht weiter als das letzte mal ... Dabei war schon alles fertig, bevor er wieder mal alles auseinandernehmen und viiiiel besser bauen wollte. Daß das Programm nicht fertig war versteht sich von selbst und so wurde er ersatzweise mit dem Programm von BUGG-Y betrieben. HARVESTER hatte eine links-rechts Steuerung mit einem unglaublich breiten "Mähdrescher"-Kugelsammeler. Die gesammelten Kugeln sollten über einen vertikal angeordneten Schiebesorter verteilt werden. Mechanische und programmtechnische Probleme verhinderten dies allerdings ... Leider war auch der breite Mähdrescher eine mechanisch anfällige Konstruktion, welche immer wieder von gegnerischen Bots zerstört wurde. Wie es Georg trotz dieser Mängel geschafft hat Zweiter zu werden ist mir ein Rätsel! (Möglicherweise haben ihm aber die zwei Freilose dabei geholfen! *g) Techn. Ausrüstung: 3 Motore, 3 Taster, 1 Lichtsensor Fazit: seltsam ... |
 |




 |
 |
NOBODY: David
ist ein Seelenverwandter von Georg. Auch er kam mit seinem Bot in
Einzelteilen an ... NOBODY hatte eine links-rechts Steuerung mit Gummiraupen. Als Sorter war ein Schiebesorter ähnlich dem von BUGG-Y angebaut. Anders als bei BUGG-Y, wo ein Mikromotor den Sorter betrieben hat, kam bei NOBODY ein großer Motor zum Einsatz. Dieser war allerdings zu wenig untersetzt und damit war der Sorter ungenau. Da es leider kein eigenes Programm gab kam auch hier das Programm von BUGG-Y zum Einsatz. (He, nach der Anzahl der Verwendungen meiner Programme habe ich doch gewonnen, oder?) Techn. Ausrüstung: 3 Motore, 2 Taster, 1 Lichtsensor Fazit: Hhhmmm ... |


 |
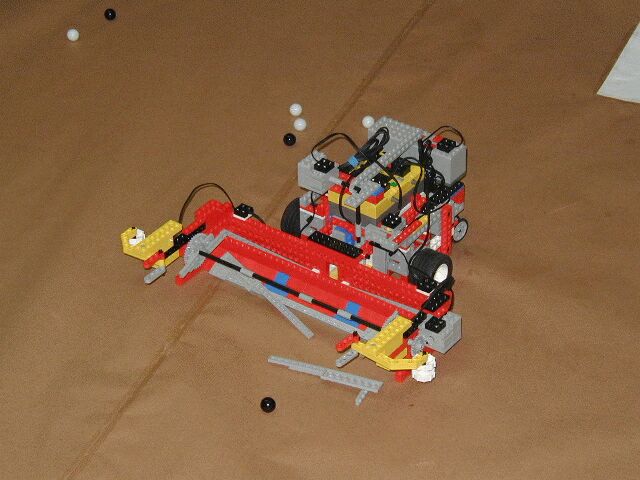
| ROADRUNNER
II: Dieser Bot basierte auf meinem "ROADRUNNER" der ersten
Robobattle. ROADRUNNER II hatte einen "Kugelaufzug" bestehend aus
den 3 dünnen großen Reifen in Fahrzeigmitte. Eingefangene Kugeln wurden zwischen die
Reifen geklemmt und hochgehoben (dieser Motor lief dauernd über einen eigenen
Batteriekasten). Dann liefen die Kugeln aus dem Auffangbecken in einen
Schiebesorter
(eigener Lichtsensor und Taster) und wurden ausgeworfen oder in den Lagerbehälter
geschoben. Der Antrieb und die Sensoren funktionierten diesmal einwandfrei,
leider hat das Programm des Schiebesorters nicht so recht arbeiten
wollen. Also fuhr ROADRUNNER II wie ein Staubsauger über das Spielfeld, sammelte alle Kugeln und sortiere die Falschen nicht aus --> viele, viele Minuspunkte! Techn. Ausrüstung: 2 Motore, 1 Mikromotor, 2 Taster, 1 Lichtsensor Fazit: mechanisch einwandfrei, Sorterprogramm gehört verbessert ... |
 |




 |
 |
ROTER
OKTOBER: Mark one, Mark two, Ozean
deep! Klaus und Patrick haben uns diesmal ein U-Boot vor die Nase, ähh auf das Spielfeld gesetzt. ROTER OKTOBER hatte die übliche links-rechts Steuerung. Er war eine gewaltige mechanische Konstruktion, groß, schwer und lang. In Bootsmitte hatte er einen langsam drehenden Kugelaufzug Patent "ROADRUNNER". Ein seitlich angeordneter Lichtsensor überwachte die soeben eingefangene Kugel. War es eine Gute, so hat der Kugelaufzug sie bis zum Ende befördert und sie rollte in den Auffangbehälter. War es eine falsche Kugel, so fing ein Finger zwischen den Reifen des Kugelaufzuges zu rotieren an und hat die Kugel aus dem Aufzug geschleudert. Tolle Konstruktion, Klaus und Patrick! Techn. Ausrüstung: 4 Motore, 1 Taster, 1 Lichtsensor Fazit: nette Konstruktion, allerdings viel Ballast an Bord ... |
| Leider war ROTER OKTOBER ständig getaucht und kam mir daher nicht vor die Kamera ... |
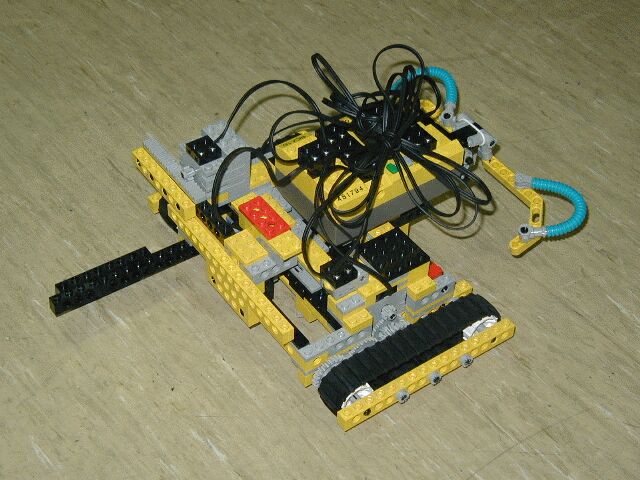
| SKORPIO: Typisch
Alexander! Alle sammeln Kugeln, nur er baut einen Jäger! SKORPIO hatte eine links-rechts Steuerung und Gummiraupen. Mit seinem dritten Motor hat er allerdings keinen Kugelsorter angetrieben. Warum auch, er wollte ja keine Kugeln sammeln. Vielmehr kippte dieser Motor nach einiger Zeit eine Rampe mit einem darauf befindlichen Gewicht. Dieses fiel aufs Spielfeld, spannte die daran befestigte Schnur und zog dadurch ein weiteres Gewicht vom Bot. Nach dieser Aktion lagen zwei Gewichte mit gespannter Schnur verbunden in Spielfeldmitte und sollten die gegnerischen Bots am Sammeln hindern. Seine wenigen Punkte erreichte SKORPIO dadurch, daß er vorne eine Schubraupe hatte und damit einige Kugeln in die Nester schob. Techn. Ausrüstung: 3 Motore, 2 Gewichte, 1 Schnur Fazit: Hallali, ein JägersBot ... |
 |



 |
 |
Action!: Lange nach dem
geplanten Termin ging es dann doch noch los. Es wurden jeweils zwei Kämpfe ausgetragen,
jeder hatte einmal die schwarzen und einmal die weissen Kugeln. Allerdings
haben wir die Einzelkämpfe auf drei Minuten gekürzt, es hätte wegen des
späten Beginns wohl zu lange gedauert ... Diesmal haben wir es auch geschafft, ohne helfende Hand von außerhalb des Spielfeldes auszukommen. Alle Sensoren haben halbwegs einwandfrei die Wände oder die Gegner erkannt. Nach 16 Zweikämpfen im Doppel-KO-System standen sich dann ALPHA und HARVESTER im Finale gegenüber, welches ALPHA schließlich für sich entscheiden konnte. Das Endergebnis war: 1. ALPHA, 2. HARVESTER, 3. BETA |



 

 |
| Fazit: Es hat
wieder Spass
gemacht! Ob ich allerdings Martin noch mal einlade muß ich mir gut
überlegen. Hat er doch die wertvollen Sachpreise (*g) für den ersten und
den dritten Platz mitgenommen ... Anbei ein MS Excel File zur Verwaltung von maximal 8 bzw. 16 Spielern für das Doppel-KO-System. Es werden automatisch die Ergebnisse berechnet und die Spieler weitergereicht, der Sieger bleibt oben, der Verlierer kommt in die Hoffnungsrunde. |
MS Excel97: battle8.xls battle16.xls für 8 / 16 Spieler DoppelKoSystem |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
3.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
3.wiener battle ![]() sensoren
sensoren