roboter
![]()
Lego
RCX
Technik
Thunder &
Lightning
Humanoid Sumo
 |
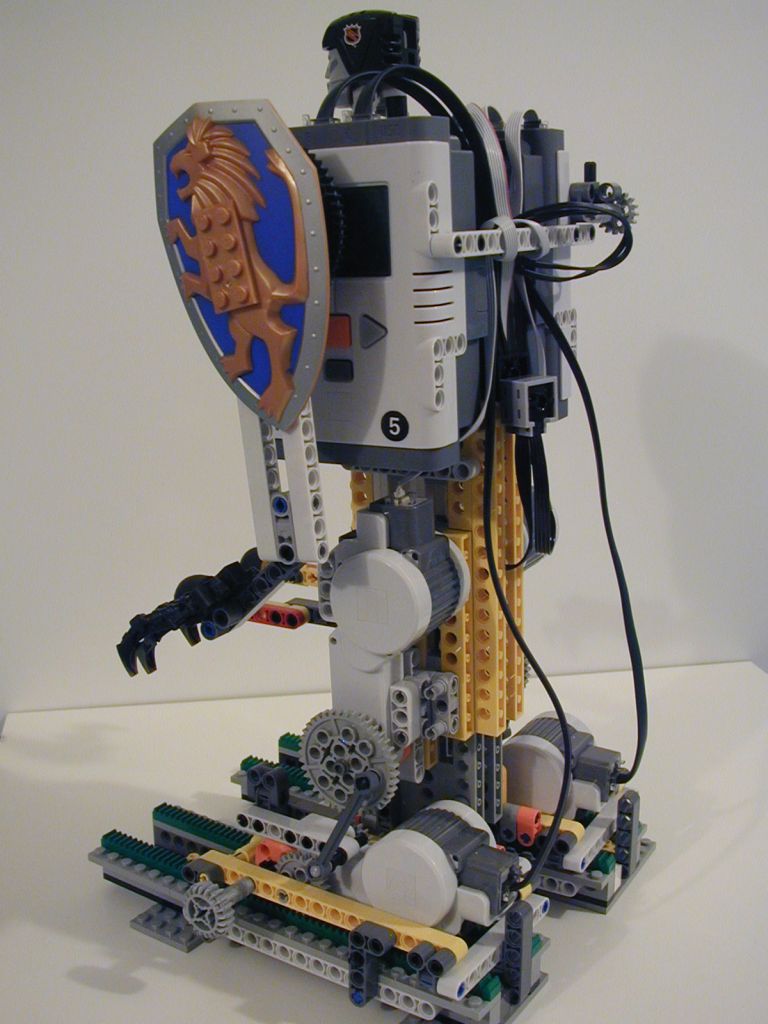
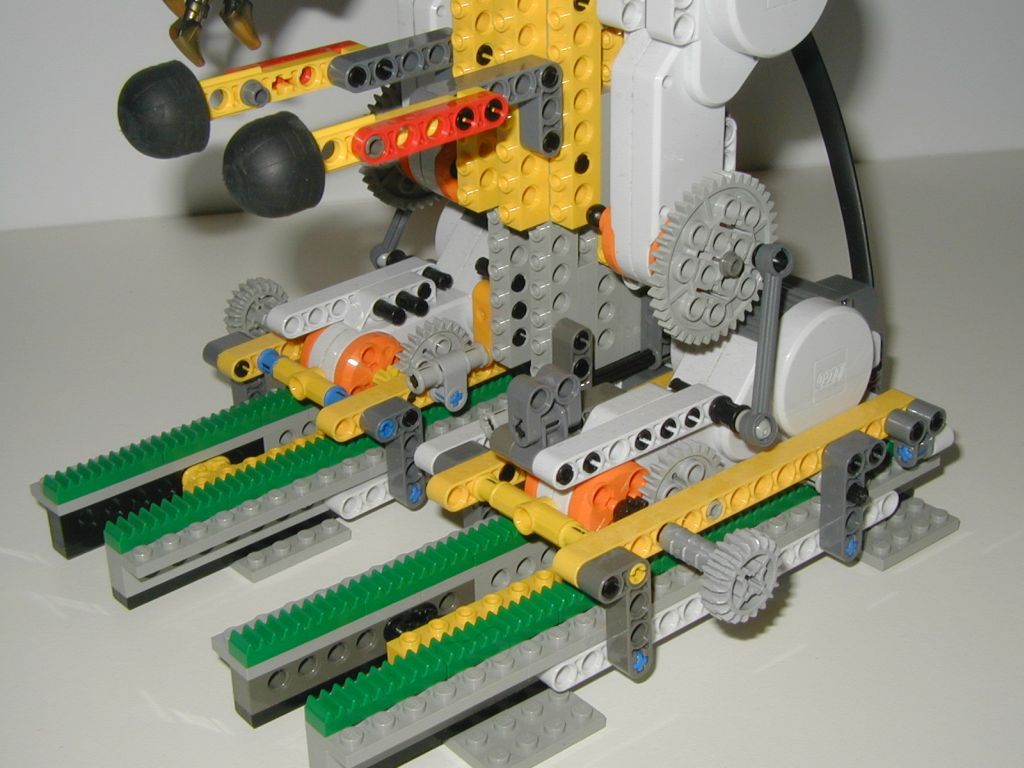
Thunder & Lightning: Dieser
Line-Follower-Roboter wurde für die
RobotChallenge 2009 in Wien / Humanoid Sumo gebaut. Thunder war so konstruiert, daß er sein Gewicht auf jeweils einen Fuß verlagern konnte und somit den anderen Fuß ein wenig in die Höhe hob. Anschließend schob sich der Roboter auf seiner beweglichen Fußsohle ein Stück nach vorne, bei dem in der Luft befindlichen Fuß schob sich die Fußsohle hingegen nach hinten. Anschließend wurde das Gewicht auf den anderen Fuß verlagert und es wurde wieder ein Stück auf der Fußsohle nach vorne gefahren. Wenn Thunder lenken wollte, blieb er auf beiden Fußsohlen stehen und sie bewegten sich gegengleich und drehten damit den Roboter ein Stück. Beim Sumowettkampf funktionierte sein Bewegungsmechanismus leider nicht und er wippte nur leicht vor und zurück. Allerdings hat er durch diese Wippbewegung seinen Gegner auch zufällig gekippt und hat noch den dritten Platz geschafft! Battle: Humanoid Sumo |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||||||||||||
|
| Download Files für: ... |
roboter
![]()