roboter
![]()
Lego
RCX
Technik
SNAILBOT
Line Follower

|
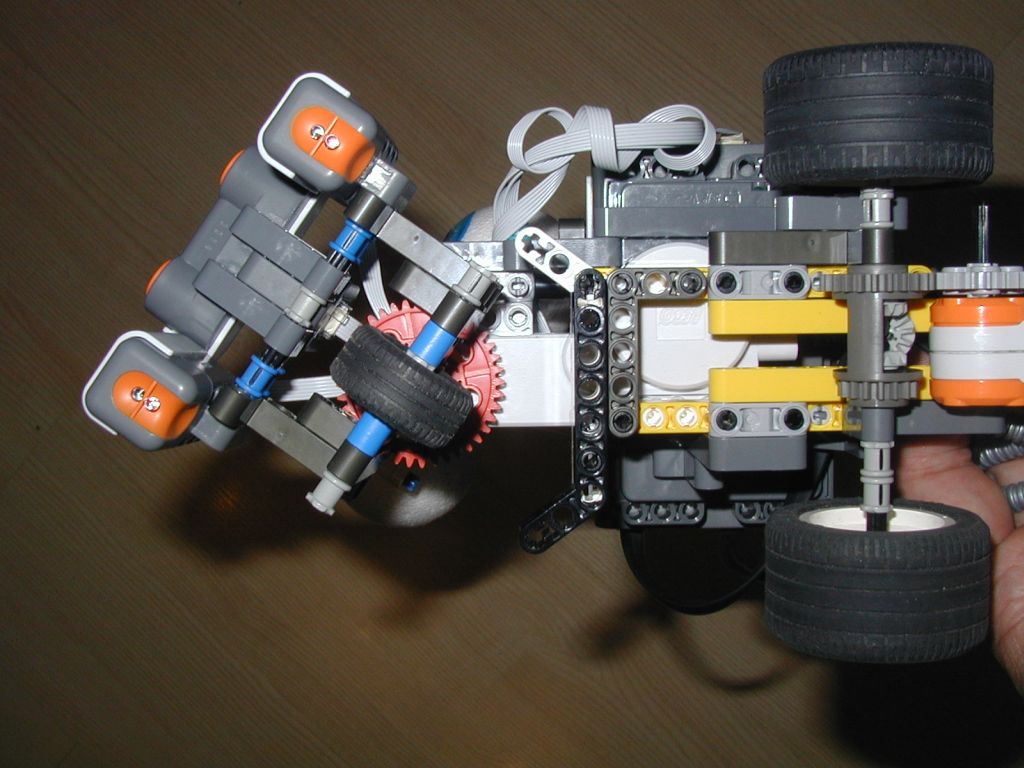
SNAILBOT: Dieser
Line-Follower-Roboter wurde für die Istrobot 2008 in Bratislava /
Linefollower gebaut.
Bei diesem Roboter habe ich eine neue Variante des Antriebs probiert:
Die Hinterräder werden gemeinsam über einen Motor und ein Differential
angetrieben. Das eine Vorderrad, an dem auch beide Lichtsensoren montiert
sind, wird von einem weiteren Motor gesteuert. D.h. wenn die Lichtsensoren
geschwenkt werden, um der Linie zu folgen, dreht sich damit auch
gleichzeitig das Vorderrad und der Roboter schwenkt in die richtige
Richtung ... |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||||||||||||||||||||||||
|
| Download Files für: ... |
roboter
![]()