roboter
![]()
Lego
RCX
Technik
Popeye

|
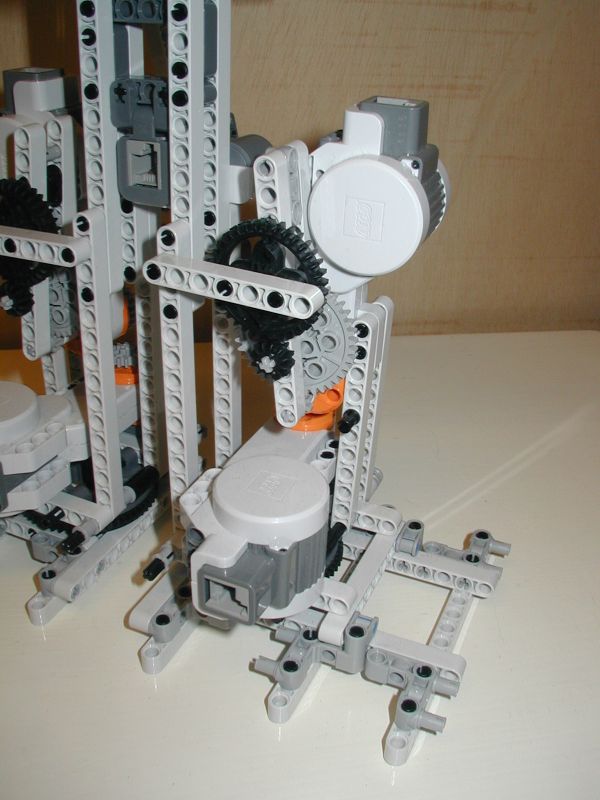
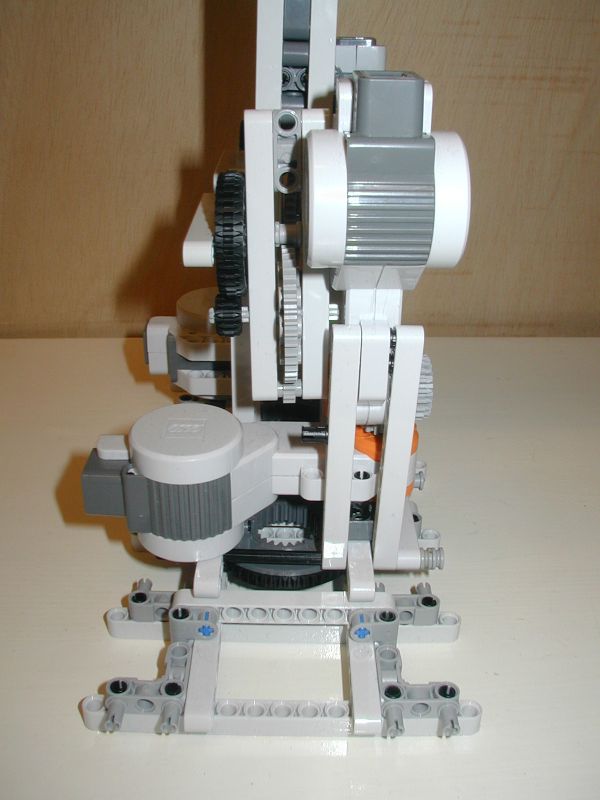
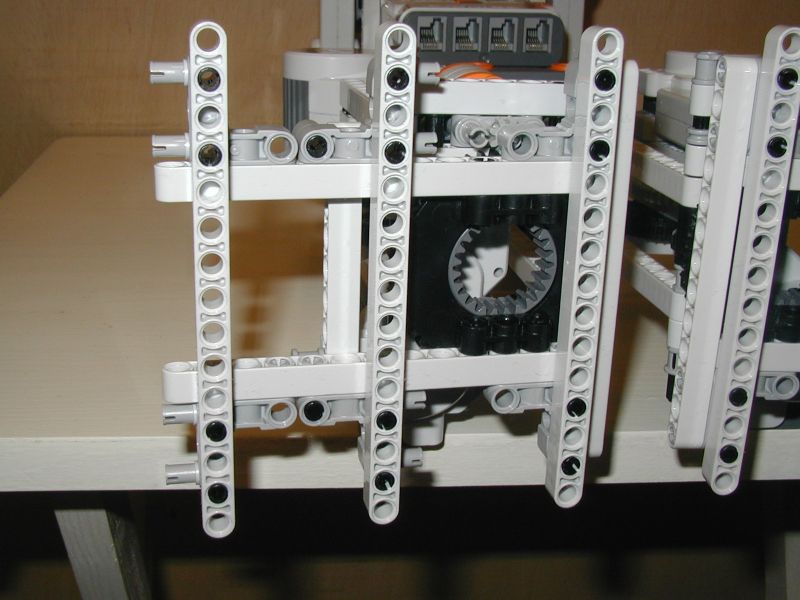
Popeye: Diesen
Roboter habe ich gebaut um an einem internationalen Contest teilnehmen zu
können, dessen Aufgabenstellung es war, aus maximal drei
Mindstorms-NXT-Baukästen einen gehenden Roboter zu konstruieren, der in
einer Wettkampfarena versuchen soll, seinen Gegner umzuwerfen. Das größte Problem besteht darin, mit seinem Roboter das Gleichgewicht zu halten (das zweitgrößte Problem ist das Gewicht des Roboters selbst!). Mein Popeye steht breitbeinig da (die Versuche ein funktionierendes Kniegelenk einzubauen scheiterten am Materialmangel) und neigt sich im Fußgelenk zur Seite, bis er auf einen Fuß kippt und einbeinig dasteht. Dann dreht er sich im Fußgelenk um ca. 30 Grad nach vorne und kippt wieder auf den zweiten Fuß zurück. Das Ganze wiederholt sich dann mit dem anderen Fuß. Daher kam auch der Name Popeye, weil er sich wie ein betrunkener Seemann bewegt. Pro Fuß brauche ich zwei Motore, einen für die Neigung, einen für
die Drehung. Die beiden restlichen Motore habe ich für die Arme
gebraucht, mit denen er seinen Gegner aus dem Gleichgewicht bringen soll
... PS: Mit im Team "Europa" war auch Andreas Dreier,
dessen gehender Roboter "Pinguin" hier
betrachtet werden kann ... |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||











 Popeye geht (800 kB) |
| Download Files für: ... |
roboter
![]()