roboter ![]()
Lego
RCX
Technik
Grey November
Mark I & II
20000 Meilen unter dem Meer, oder so ...
 |
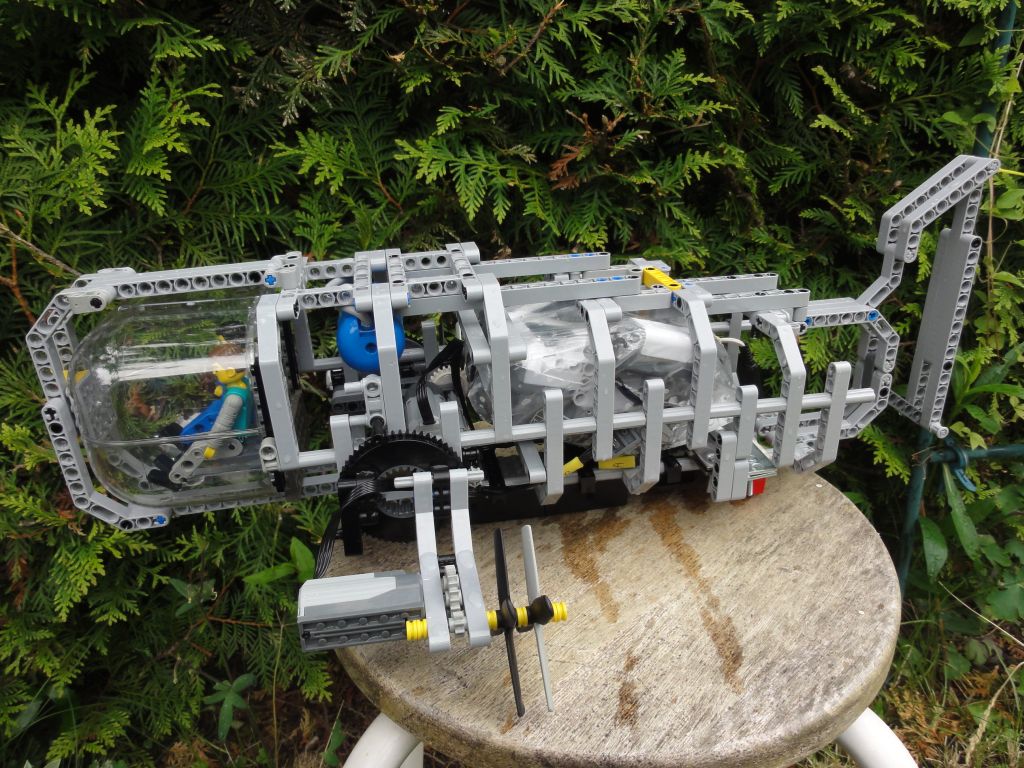
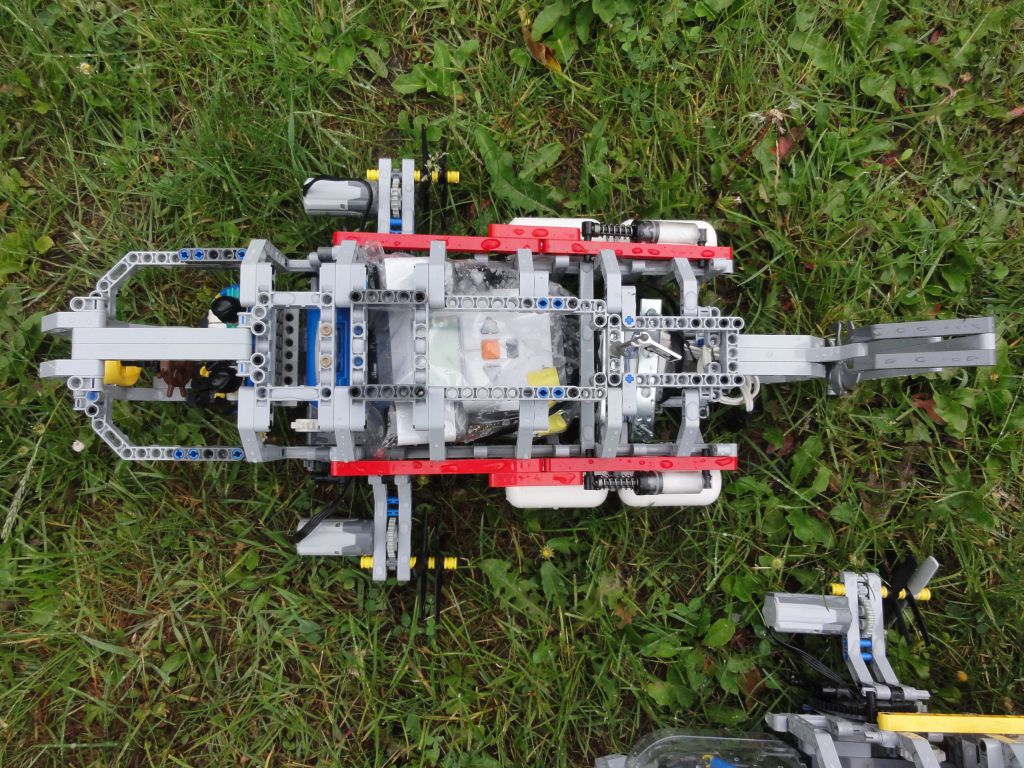
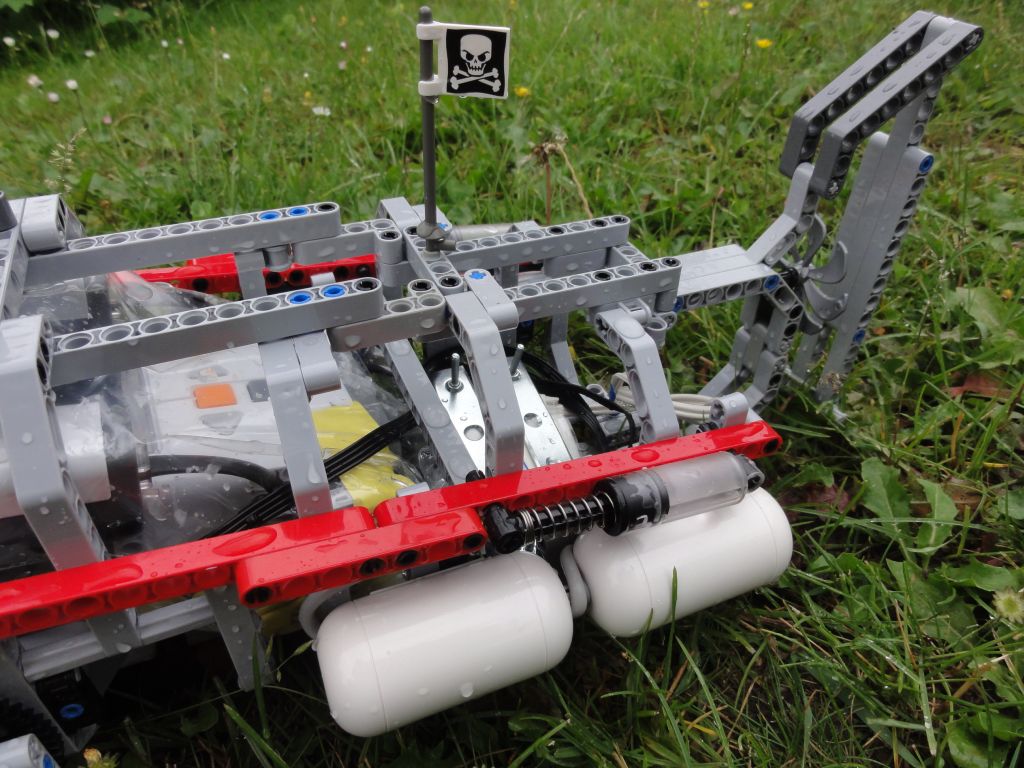
Grey November, Mark I & II: Für einen LEGO internen Wettbewerb hab ich ein funktionierendes U-Boot gebaut ... naja, eigentlich hab ich zwei gebaut, das zweite ein wenig gepimpt, sonst aber halbwegs baugleich. Die Aufgabe war, ein funktionierendes U-Boot zu bauen, das autark (mit Mindstorms, nicht ferngesteuert) tauchen und wieder auftauchen kann. Also hab ich meinen NXT samt Sensoren in ein Plastiksackerl eingeschweißt, nur die drei Kabel für die Motore (2xVortrieb, 1xAuf/Abtrieb) und ein Kabel zum Laden des Akkus kommen aus dem Sackerl raus. Den Saum des Sackerls habe ich mit zweifachem doppelseitigem Klebebband und viel Uhu abgedichtet, anschließend dann noch mit zwei Metallstreifen zusammengeschraubt, damit es extra dicht ist. Bei meinen Tests habe ich bemerkt, daß Bluetooth, mit dem ich probehalber die Motore steuern wollte, schon nach wenigen Zentimetern Wassersäule verschluckt wird ... also nix mit mal so testen! Jedes U-Boot hat einen Kompasssensor an Bord, und es soll auch noch eine Verfolgungsfahrt möglich werden ... Steven Canvin challenged us for building "the most intelligent NXT-driven submarine" ... and so I did! I decided to build a normal hull out of technic beams and placed the NXT as usual inside the structure. But with this submarine I sealed the NXT and the sensors inside a plastic bag. With this plastic bag I can watch the display and push all the buttons I need ... and the cables I need for motors and sensors are glued in at the seam of the bag to seal it tight ... There was also an additional cable to the outside to be able to charge the battery! I built two submarines, Grey November Mark I and Grey November Mark II ... The first sub is equipped with a compas sensor and a color sensor (for signaling it's state to the outside) and the second one with a compas sensor and an IRseeker. I want to try that the second sub will follow the first automatically. For that purpose I will attach an IR ball to the first sub ... |
| von mir gebaut | X | X | ||||
| mit anderen gebaut | ||||||
| Grabber, Sammler, Fänger | ||||||
| für RoboBattle oder Wettbewerb | ||||||
| Technische Meisterleistung (genial) | ||||||
| Usefull Inventions (dienstbar) |
|
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||
| Download Files für: ... |
roboter ![]()