|
Handyman: Die
hilfreiche Hand wiederholt eine gelernte Tätigkeit immer wieder ...
HandyMan ist einem Industrieroboter nachgebaut.
Er hat 5 Freiheiten (er kann sich um fünfAchsen bewegen) und einen
Greifer.
Aufbauend auf den großen Technik-Drehscheiben besteht er aus:
- der Hüfte (drehen)
- der Schulter (abbiegen)
- dem Ellenbogen (abbiegen)
- dem Unterarm (drehen)
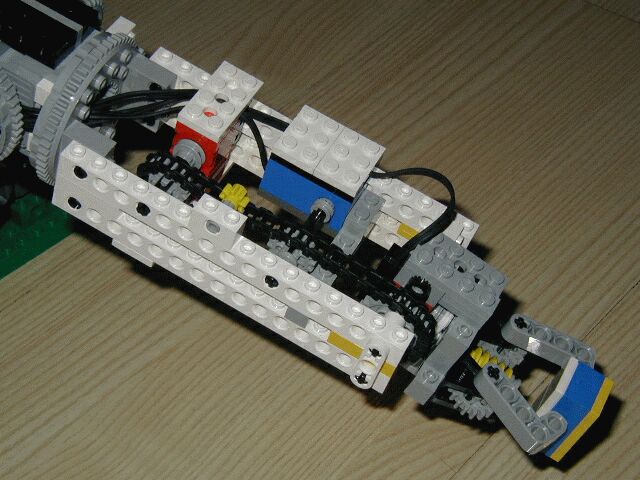
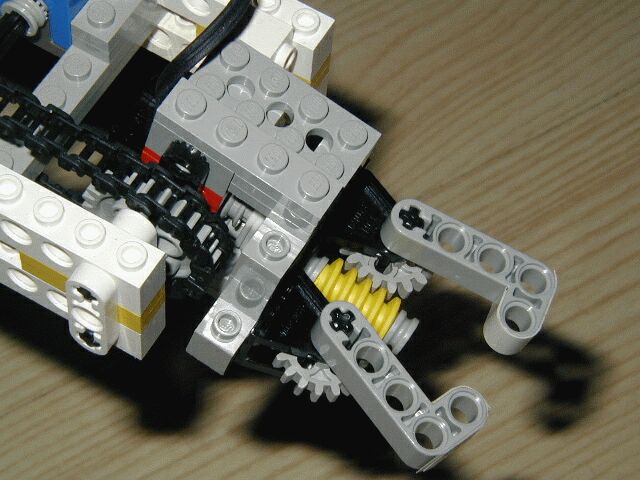
- dem Handgelenk (abbiegen)
- den Fingern (schliessen)
Zwei der sechs Motore sind wegen dem geringeren Gewicht Mikromotore
(Handgelenk und Finger). Um das Gewicht des Arms einwandfrei und genau
drehen und heben zu können werden die Drehscheiben der Hüfte, Schulter
und Ellenbogen über Schneckengetriebe angetrieben. Jedes Gelenk ist
zusätzlich mit einem Rotationssensor ausgerüstet. Bei den Fingern habe
ich auf Sensoren verzichtet. Dort übernimmt die beim Mikromotor
eingebaute Rutschkupplung die Enderkennung.
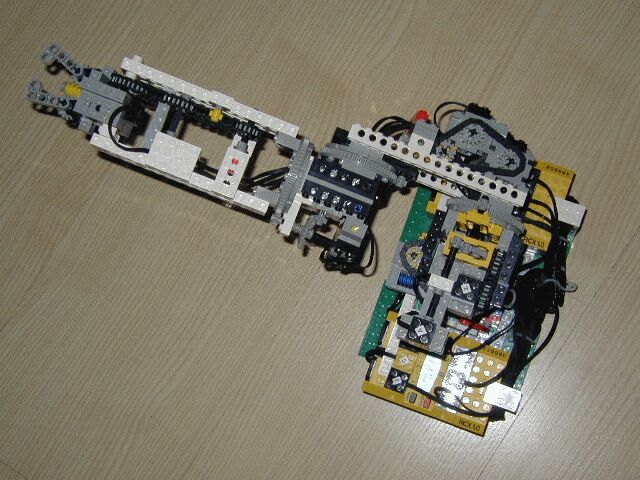
Die Steuerung von Handy übernehmen 2 RCXe.
Der erste RCX steuert die Hüfte, die Schulter, den Ellenbogen und die
drei zugehörigen Rotationssensoren. Der zweite RCX übernimmt den
Unterarm, das Hangelenk, die Finger und zwei weitere Rotationssensoren
(nur die Finger haben keinen Sensor). Die händische Fernbedienung erfolgt
über den dritten RCX. Dieser RCX hat einen Taster, der die sechs Motore
zyklisch steuert. Mit einem Schalthebel kann man den jeweils gewählten
Motor bedienen. Die Befehle sendet der dritte RCX an die anderen beiden
RCXe per Infrarotverbindung.
Durch die Verwendung der Schneckengetriebe ist HandyMan sehr kraftvoll und
kann geringe Gewichte einwandfrei heben. Bei der Verkabelung wurde darauf
Rücksicht genommen, daß alle Kabel durch die Mittelöffnung der
Technik-Drehscheiben geführt werden. Dadurch sind volle Drehungen um die
eigene Achse möglich. HandyMan ist mit einem Teach-Modus ausgestattet, in
welchem er sich durch die Rotationssensoren die Stellung seiner Gelenke
merken kann. (Auf Tastendruck der Fernsteuerung merkt sich jeder RCX im
eigenen Datalog die Stellung seiner drei angesteuerten Motore und Gelenke.
Aus der Information beider RCXe kann dann ein vollständiges Programm
geschrieben werden, mit welchem sich eine zuvor gelernte Tätigkeiten
immer wieder wiederholen lässt.)
|