roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
2.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
2.wiener battle ![]() sensoren
sensoren
Lego
RCX
Technik
2. WIENER
LEGO MINDSTORMS ROBO-BATTLE
Vorbereitungen: Vormittag
Robot: BENJAMIN
Robot: RADAR LOVE
Robot: abgesagt!
Robot: verhindert!
Robot: nicht fertig geworden!
Start der Battle: Action!
Was haben wir daraus gelernt?: Fazit
Archiv: Info zur Robo-Battle am. 22.10.2000
 |
Vormittag: Am
22. 10.
2000 war es wieder soweit! Leider stand diese Battle unter keinem guten
Stern, es gab zu viele Absagen im Vorfeld. Entweder vergessene Termine,
Unlust oder der eigene Roboter wurde nicht rechtzeitig fertig ... Also blieben zur mehr zwei wackere Teilnehmer über. |

 |
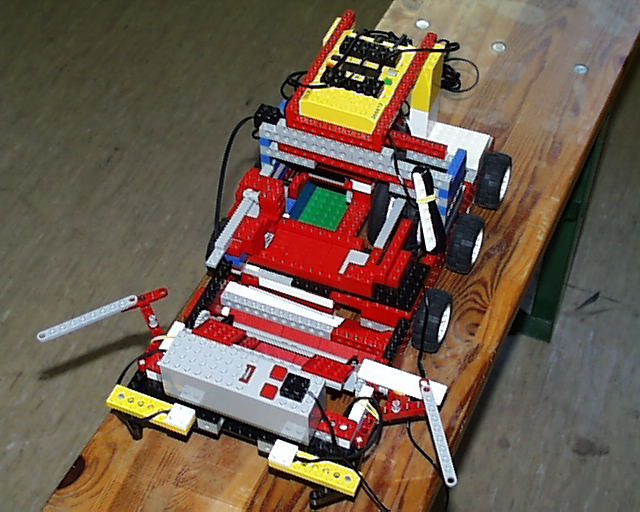
| BENJAMIN:
Ein sechsrädiger Roboter mit unabhängiger links-rechts Steuerung. Die
Konstrukteure dieses Roboters waren sich aber über den
Kugelfang-Mechanismus nicht einig. Deshalb hatte BENJAMIN sowohl ein Art
von Mähdrescher (von Gynther) als auch einen Kugelaufzug "Patent
ROADRUNNER" (von Georg) eingebaut. Anschließend sollte die Kugel mit
einem Schiebesorter verteilt werden. Leider dauerte die mechanische
Konstruktion so lange, daß für die Software keine Zeit mehr blieb ... Technische Ausrüstung: 3 Motore, 3 Taster, 1 Lichtsensor Bewertung: wenn er fertig wäre ... |
 |


 |
 |
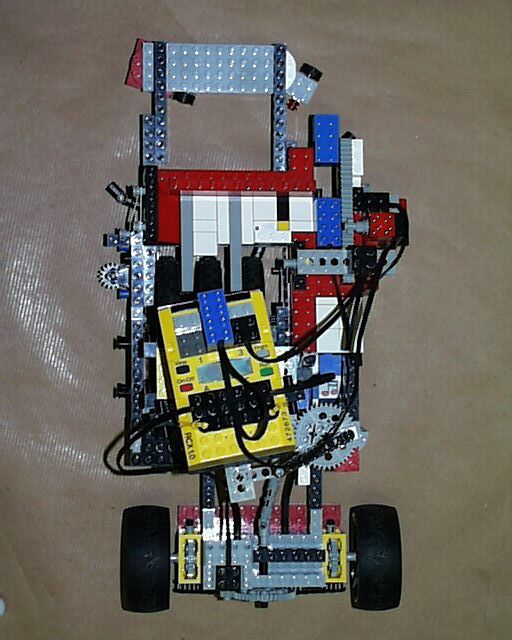
RADAR LOVE:
Dieser Roboter basiert auf meinem "ROADRUNNER" der ersten
Robobattle. Ich habe die guten Seiten (Kugelaufzug und Sorter) übernommen
und die anderen Schwachpunkte (Lenkung und Begrenzungstaster) verbessert. Da das Erkennen der Spielfeldwände mit Tastern nicht immer einwandfrei funktionierte, habe ich die Taster komplett ersetzt. RADAR LOVE ist mit einem "Radar" ausgerüstet. Dieses besteht aus dem RXC, welcher dauernd Infrarotimpulse aussendet, und einem nach vorne zeigenden Lichtsensor. Der Lichtsensor misst dauernd die Menge des reflektierten Lichtes und kann daraus ableiten, wie weit er von einer Wand entfernt ist. Um die Wände auch einwandfrei erkennen zu können, wenn der Roboter schräg darauf zufährt, schwenkt die RCX-Lichtsensoreinheit vom Kugelaufzugs-Motor angetrieben, fortwährend hin und her. Technische Ausrüstung: 3 Motore, 1 Taster, 2 Lichtsensoren Bewertung: Inovativer Kugelsorter und Radar, Fahrgestell ausbaufähig! |



 |
| abgesagt: Techn. Ausrüstung: Fazit: |
| verhindert: Techn. Ausrüstung: Fazit: |
| nicht fertig geworden: Techn. Ausrüstung: Fazit: |
| Action!:
Diesmal war die Battle kurz! RADAR LOVE kam, fuhr seine 5 Minuten
(allein), sammelte die richtigen Murmeln und siegte! In Ermangelung eines Gegeners war das Endergebnis so: 1. RADAR LOVE |
| Fazit: Es hat
wieder Spass
gemacht! Anbei ein MS Excel File zur Verwaltung von maximal 8 Spielern für das Doppel-KO-System. Es werden automatisch die Ergebnisse berechnet und die Spieler weitergereicht, der Sieger bleibt oben, der Verlierer kommt in die Hoffnungsrunde. |
MS Excel97: battle8.xls für max. 8 Spieler DoppelKoSystem |
![]()
Bei Fragen zur Battle --> mail to mike
roboter ![]() @mike's page > hobbies
> mindstorms > robo-battle >
2.wiener battle
@mike's page > hobbies
> mindstorms > robo-battle >
2.wiener battle ![]() sensoren
sensoren